

经典PID控制器的积分分离优化算法
电子说
描述
我们已经讲述了PID控制器的实现,包括位置型PID控制器和增量型PID控制器。但这个实现只是最基本的实现,并没有考虑任何的干扰情况。在本节及后续的一些章节,我们就来讨论一下经典PID控制器的优化与改进。这一节我们首先来讨论针对积分项的积分分离优化算法。
1、基本思想
我们已经讲述了PID控制引入积分主要是为了消除静差,提高控制精度。但在过程的启动、结束或大幅度增减设定值时,短时间内系统输出有很大偏差,会造成PID运算的积分累积,引起超调或者振荡。为了解决这一干扰,人们引入了积分分离的思想。其思路是偏差值较大时,取消积分作用,以免于超调量增大;而偏差值较小时,引入积分作用,以便消除静差,提高控制精度。
具体的实现步骤是:根据实际情况,设定一个阈值;当偏差大于阈值时,消除积分仅用PD控制;当偏差小于等于阈值时,引入积分采用PID控制。则控制算法可表示为:

其中β称为积分开关系数,其取值范围为:
由上述表述及公式我们可以知道,积分分离算法的效果其实与ε值的选取有莫大关系,所以ε值的选取实际上是实现的难点,ε值过大则达不到积分分离的效果,而ε值过小则难以进入积分区,ε值的选取存在很大的主观因素。
对于经典的增量式PID算法,似乎没有办法由以上的公式推导而来,因为β随着err(k)的变化在不是修改着控制器的表达式。其实我们可以换一种角度考虑,每次系统调节未定后,偏差应该为零,然后只有当设定值改变时,系统才会响应而开始调节。设定值的改变实际上是一个阶跃变化,此时的控制输出记为U0,开始调节时,其调节增量其实与之前的一切没有关系。所以我们就可以以变化时刻开始为起点,而得到带积分分离的增量算法,以保证在启动、停止和快速变化时防止超调。公式如下:

其中β的取值与位置型PID算法一致。可能有人会担心偏差来回变化,造成积分作用的频繁分离和引入,进而使上述的增量表达式无法实现。其实我们分析一下就能发现,在开始时,由于设定值变化引起的偏差大而分离了积分作用,在接近设定值时,偏差变小就引入了积分,一边消除静差,而后处于稳态,直到下一次变化。
2、算法实现
这一部分,我们根据前面对其基本思想的描述,来实现基于积分分离的PID算法实现,同样是包括位置型和增量型两种实现方式。首先我们来看一下算法的实现过程,具体的流程图如下:
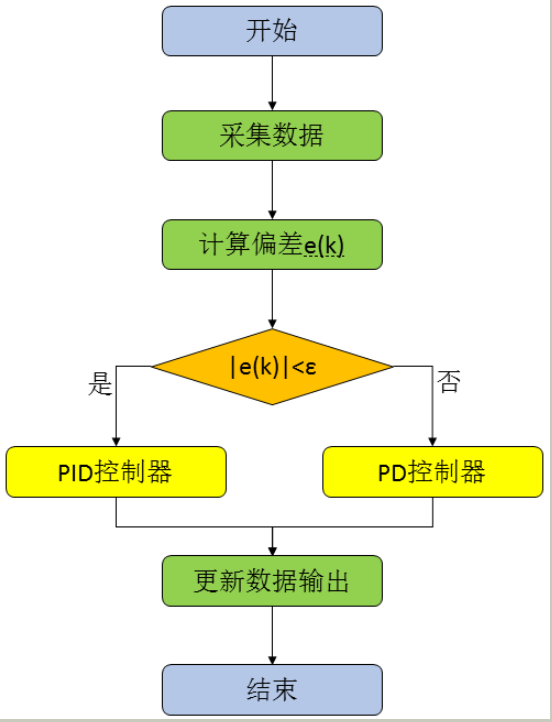
有上图我们知道,与普通的PID算法的区别,只是判断偏差的大小,偏差大时,为PD算法,偏差小时为PID算法。于是我们需要一个偏差检测与积分项分离系数β的函数。
1 static uint16_t BetaGeneration(float error,float epsilon)
2
3 {
4
5 uint16_t beta=0;
6
7 if(abs(error)<= epsilon)
8
9 {
10
11 beta=1;
12
13 }
14
15 return beta;
16
17 }
(1)位置型PID算法实现
根据前面的分析我们可以很轻松的编写程序,只需要在编写程序时判断偏差以确定是否引入积分项就可以了。同样先定义PID对象的结构体:
1 /*定义结构体和公用体*/
2
3 typedef struct
4
5 {
6
7 float setpoint; //设定值
8
9 float proportiongain; //比例系数
10
11 float integralgain; //积分系数
12
13 float derivativegain; //微分系数
14
15 float lasterror; //前一拍偏差
16
17 float result; //输出值
18
19 float integral;//积分值
20
21 float epsilon; //偏差检测阈值
22
23 }PID;
接下来实现PID控制器:
1 void PIDRegulation(PID *vPID, float processValue)
2
3 {
4
5 float thisError;
6
7 thisError=vPID->setpoint-processValue;
8
9 vPID->integral+=thisError;
10
11 uint16_t beta= BetaGeneration(error, vPID->epsilon);
12
13 if(beta>0)
14
15 {
16
17 vPID->result=vPID->proportiongain*thisError+vPID->derivativegain*(thisError-vPID->lasterror);
18
19 }
20
21 else
22
23 {
24
25 vPID->result=vPID->proportiongain*thisError+vPID->integralgain*vPID->integral+vPID->derivativegain*(thisError-vPID->lasterror);
26
27 }
28
29
30
31 vPID->lasterror=thisError;
32
33 }
与普通的PID算法的区别就是上述代码中增加了偏差判断,来决定积分项的分离与否。
(2)增量型PID算法实现
对于增量型PID控制,我们也可以采取相同的处理。首先定义PID对象的结构体:
1 /*定义结构体和公用体*/
2
3 typedef struct
4
5 {
6
7 float setpoint; //设定值
8
9 float proportiongain; //比例系数
10
11 float integralgain; //积分系数
12
13 float derivativegain; //微分系数
14
15 float lasterror; //前一拍偏差
16
17 float preerror; //前两拍偏差
18
19 float deadband; //死区
20
21 float result; //输出值
22
23 float epsilon; //偏差检测阈值
24
25 }PID;
接下来实现PID控制器:
1 void PIDRegulation(PID *vPID, float processValue)
2
3 {
4
5 float thisError;
6
7 float increment;
8
9 float pError,dError,iError;
10
11
12
13 thisError=vPID->setpoint-processValue; //得到偏差值
14
15 pError=thisError-vPID->lasterror;
16
17 iError=thisError;
18
19 dError=thisError-2*(vPID->lasterror)+vPID->preerror;
20
21 uint16_t beta= BetaGeneration(error, vPID->epsilon);
22
23 if(beta>0)
24
25 {
26
27 increment=vPID->proportiongain*pError+vPID->derivativegain*dError; //增量计算
28
29 }
30
31 else
32
33 {
34
35 increment=vPID->proportiongain*pError+vPID->integralgain*iError+vPID->derivativegain*dError; //增量计算
36
37 }
38
39 vPID->preerror=vPID->lasterror; //存放偏差用于下次运算
40
41 vPID->lasterror=thisError;
42
43 vPID->result+=increment;
44
45 }
这就实现了增量型PID控制器积分分离算法,也没有考虑任何的干扰条件,仅仅只是对数学公式的计算机语言化。
3、总结
积分分离算法的思想非常简单。当然,对于β的取值,很多人提出了改进措施,例如分多段取值,设定多个阈值ε1、ε2、ε3、ε4等,不过这些阈值也需要根据实际的系统来设定。除了分段取值外,甚至也有采用函数关系来获取β值。当然,这样处理后就不再是简单的积分分离了,特别是在增量型算法中,实际上已经演变为一种变积分算法了。已经偏离了积分分离算法的设计思想,在后面我们会进一步说明。
编辑:hfy
-
【技术干货】PID算法原理分析及优化2023-12-22 2830
-
跪求用labview编写的各种控制算法的子VI,比如前反馈pid,积分分离和模糊控制等。2018-01-22 3439
-
PID控制器开发笔记之一:PID算法原理及基本实现2018-04-21 6087
-
PID控制器开发笔记之二:积分分离PID控制器的实现2018-04-28 3463
-
PID控制器开发笔记之四:梯形积分PID控制器的实现2018-05-13 3234
-
FOA优化算法整定PID控制器参数2021-08-30 1898
-
讲述PID算法中积分项的优化2022-01-19 1994
-
一种改进的PID控制算法An improved PID co2009-05-26 776
-
基于积分分离PID控制的交流伺服系统2010-08-29 1196
-
积分分离PID算法在横机控制器中的应用2011-06-16 1068
-
基于免疫遗传算法优化的自调整PID控制器研究2017-11-22 1077
-
PID控制算法的C语言实现2022-01-13 1778
-
如何使用PID控制算法优化控制系统2023-08-29 5916
-
什么是PID控制器?PID控制器积分控制介绍2024-01-11 3309
-
西门子增量式PID算法带积分分离2024-12-07 2621
全部0条评论

快来发表一下你的评论吧 !
