

一文详解伺服电机与伺服控制器
描述
伺服的结构是怎样的?一个最简易的伺服控制单元,就是一个伺服电机加伺服控制器,今天就来解析下伺服电机与伺服控制器。
电机动作的原理
右手螺旋法则(安培定则)——通电生磁
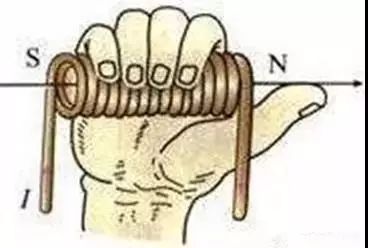
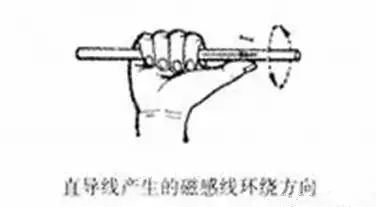
安培定则,也叫右手螺旋定则,是表示电流和电流激发磁场的磁感线方向间关系的定则。通电直导线中的安培定则:用右手握住通电直导线,让大拇指指向电流的方向,那么四指的指向就是磁感线的环绕方向;通电螺线管中的安培定则:用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端是通电螺线管的N极。
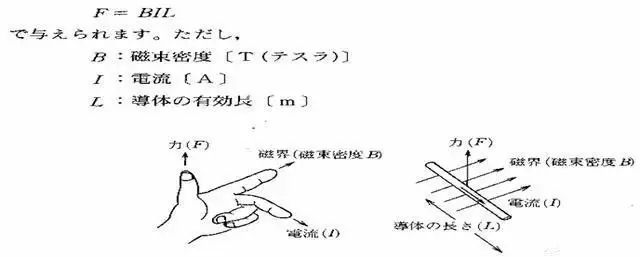
弗来明左手法则——磁生力
确定载流导线在外磁场中受力方向的定则。又称电动机定则。左手平展,大拇指与其余4指垂直,手心冲着N级,4指为电流方向,大拇指为载流导线在外磁场中受力方向。
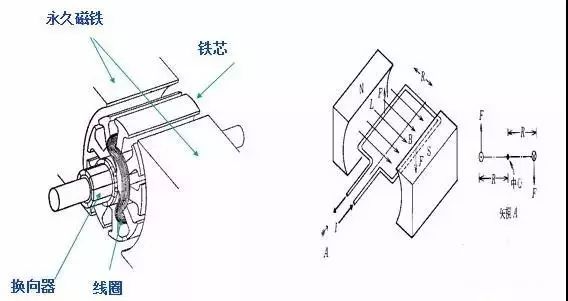
DC伺服马达结构
伺服控制单元
※ SERVO 语源自拉丁语,原意为“奴隶”的意思,指经由闭环控制方式达到一个机械系统的位置,扭矩,速度或加速度的控制,是自动控制系统中的执行单元,是把上位控制器的电信号转换成电动机轴上的角位移或角速度输出。
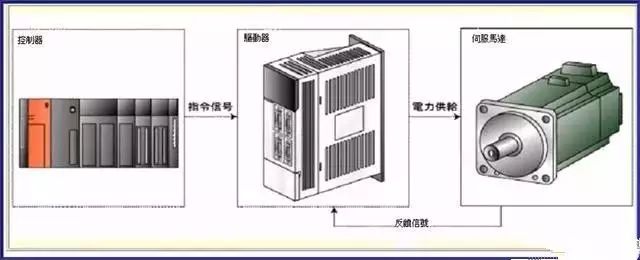
1.控制器:动作指令信号的输出装置。
2.驱动器:接收控制指令,并驱动马达的装置。
3.伺服马达:驱动控制对象、并检出状态的装置。
伺服马达的种类
伺服马达的种类,大致可分成以下三种:
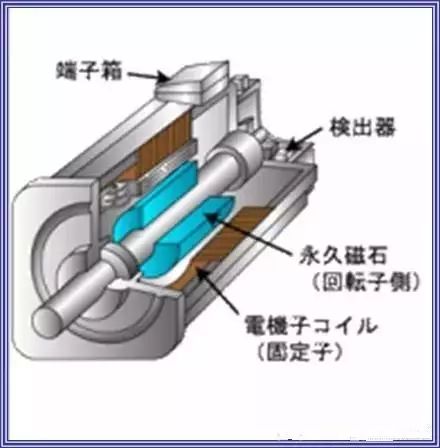
1.同步型:采用永磁式同步马达,停电时发电效应,因此刹车容易, 但因制程材料上的问题,马达容量受限制。〔回转子:永久磁铁;固定子:线圈〕
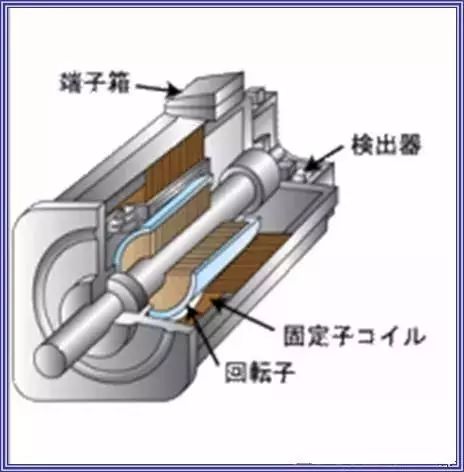
2.感应型:感应形马达与泛用马达构造相似,构造坚固、高速时转矩表现良好,但马达较易发热,容量(7.5KW以上)大多为此形式。回转子、固定子皆为线圈〕
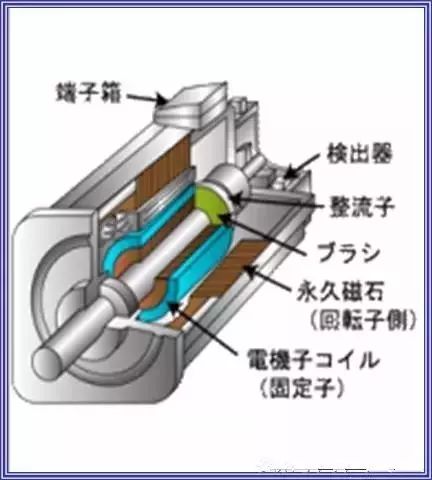
3.直流型:直流伺服马达,有碳刷运转磨耗所产生粉尘的问题,于无尘要求的场所就不宜使用,以小容量为主。〔回转子:线圈;固定子:永久磁铁;整流子:磁刷〕
SM 同 步 形 伺 服 马 达
※特长优点:1. 免维护。2. 耐环境性佳。3. 转矩特性佳,定转矩。4. 停电时可发电剎车。5. 尺寸小、重量轻。6. 高效率。
※缺点:1. AMP较DC形构造复杂。2. MOTOR及AMP必需1:1搭配使用。3. 永久磁石有消磁的可能。
IM 感 应 形 伺 服 马 达
※特长优点:1. 维护容易。2. 耐环境性佳。3. 高速时,转矩特性佳。4. 可制做大容量,效率佳。5. 构造坚固。
※缺点:1. 小容量机种,效率差。2. AMP较DC形构造复杂。3. 停电时,无法动态剎车。4. 随温度变动影响特性。5. AMP与MOTOR必需1:1使用。
DC 直 流 形 伺 服 马 达
※特长优点:1. 伺服驱动器构造简单。2. 停电时可发电剎车。3. 体积小、价格低。4. 效率佳。
※缺点:1. 整流子外围需定期保养。2. 碳刷磨耗产生(碳粉),无法应用于要求凊絜的场所。3. 因整流器碳刷的问题,高速时转矩差。4. 永久磁石有消磁的可能。
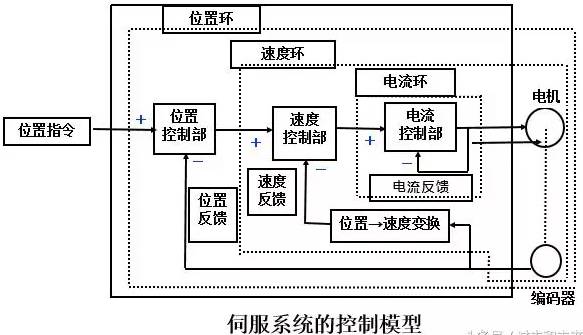
伺服的控制原理
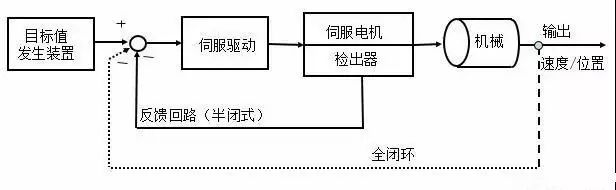
伺服系统的最大特色:透过回馈信号的控制方式〔可做指令值与目标值的比较,因而大幅减少误差状况〕。
何谓回馈信号:向控制对象下达指令后,正确的追踪并查明现在值,且随时回馈控制内容的偏差值、待目标物到达目的地后,回馈位置值,如此反复动作。
控制流程:检测机械本体之位置检出,回路为封闭系统,称之为全闭回路 。相反,检测马达轴端之回路系统就称为半闭回路。
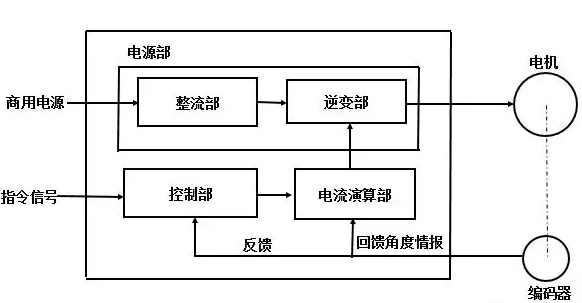
伺服驱动器的内部构成
整流部:通过整流部,将交流电源变为直流电源,经电容滤波,产生平稳无脉动的直流电源。
逆变部:由控制部过来的SPWM信号,驱动IGBT,将直流电源变为SPWM波形,以驱动伺服电机。
控制部分:伺服单元采用全数字化结构,通过高性能的硬件支持,实现闭环控制的软件化,现在所有的伺服已采用(DSP数字信号处理)芯片,DSP,能够执行位置、速度、转矩和电流控制器的功能。给出PWM信号控制信号作用于功率驱动单元,并能够接收处理位置与电流反馈,具有通讯接口。
编码器:伺服电机配有高性能的转角测量编码器,可以精确测量转子的位置与电机的转速,
逆变器采用新型电力电子半导体器件,目前,伺服控制系统的输出器件越来越多地采用开关频率很高的新型功率半导体器件,主要有大功率晶体管(GTR)、功率场效应管(MOSFET)和绝缘门极晶体管(IGPT)等。这些先进器件的应用显着地降低了伺服单元输出回路的功耗,提高了系统的响应速度,降低了运行噪声。
尤其值得一提的是,最新型的伺服控制系统已经开始使用一种把控制电路功能和大功率电子开关器件集成在一起的新型模块,称为智能控制功率模块(Intelligent Power Modules,简称IPM)。这种器件将输入隔离、能耗制动、过温、过压、过流保护及故障诊断等功能全部集成于一个不大的模块之中。其输入逻辑电平与TTL信号完全兼容,与微处理器的输出可以直接接口。它的应用显着地简化了伺服单元的设计,并实现了伺服系统的小型化和微型化。
-
电机控制器与伺服系统的关系2025-01-22 2052
-
伺服电机原理及控制应用2024-10-22 5082
-
伺服电机控制器怎么调参数2024-06-05 5492
-
基于FPGA的步进电机伺服控制器设计2023-10-25 704
-
异步伺服电机如何配合伺服控制器精确控制电机轴?2023-03-25 3011
-
伺服控制器是什么_伺服控制器用途2023-03-12 7713
-
伺服电机的工作原理 伺服电机的特点2023-03-03 3636
-
伺服控制器是怎么控制伺服电机的,原理是什么2021-07-11 7977
-
伺服控制器是伺服电机不可缺少的一部分2021-01-12 1470
-
运动控制器控制伺服电机采用的指令和伺服电机调试的6个步骤说明2019-02-17 12913
-
关于步进电机控制器与伺服电机控制器的对比浅析2018-09-16 3552
-
关于伺服电机、驱动器、控制器的一些原理详解2018-07-04 44936
-
一般的伺服电机多少钱_松下伺服电机价格2018-04-02 57797
-
基于STM32简易电机伺服控制器2018-03-05 1792
全部0条评论

快来发表一下你的评论吧 !
