

机器视觉系统工程中常见问题及处理技巧汇总
描述
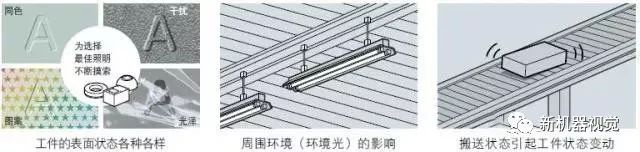
如何消除表面的干扰,实现稳定检测?
通过不同方向照明进行多张图像分析
融合相机、照明和检测算法的稳定检测新方案
使用新开发的超高速相机和超高速部分亮灯照明,对对象工件进行拍摄。这是一种全新的拍摄方法,它将对多个方向亮灯的数张 图像进行分析,并生成形状(凹凸)图像和纹理(图样)图像。由于可排除周围环境的影响及检测时工件偏差带来的不稳定因素,因此,以往需花费大量时间、具备丰富经验才能完成的图像,现在任何人都能轻松获得。
检测金属铸件表面的缺陷
忽略清洗液残留、污点、细微纹路等因素,仅检测凹痕和缺口等严重缺陷。
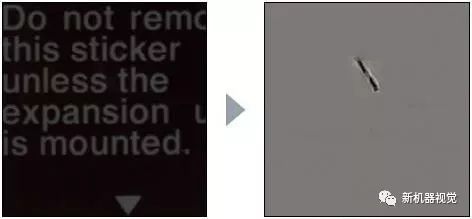
检测薄膜上的刻印
去除对检测造成不良影响的光晕,以实现稳定检测。
检测金属铸件表面的刻印
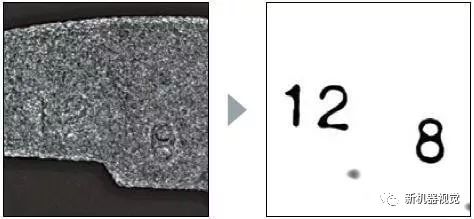
从随机的铸件表面中,突显具更大凹凸信息的刻印部分。
检测印刷上的缺陷
不受背景复杂印刷的影响,生成仅抽取缺陷的图像。
检测热封口宽度
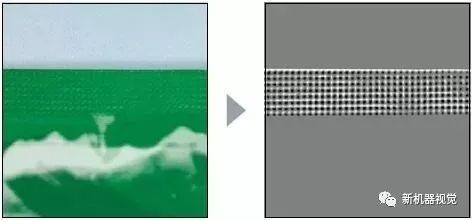
通过颜色和浓淡状态,捕捉不易发生变化的密封部凹凸信息,并进行抽取。
检测有无密封胶带
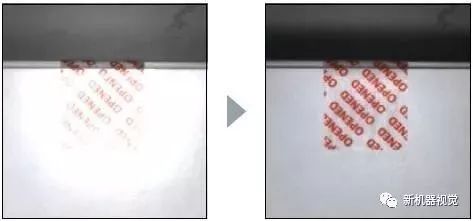
即使受工件倾斜的影响突然出现正反射现象,也可消除光晕,实现稳定检测。
解决获取稳定图像的课题
以往的图像获取课题
使用【LumiTrax 】系统均可解决
【LumiTraxTM】 原理
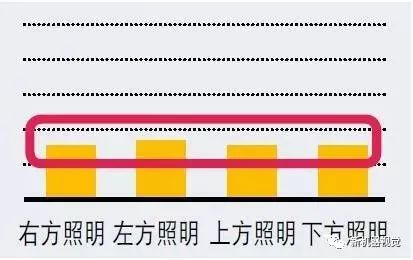
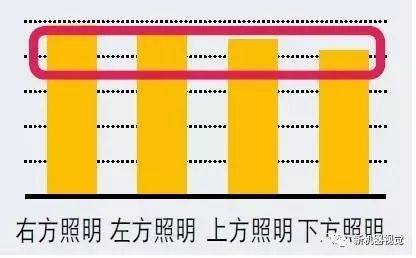
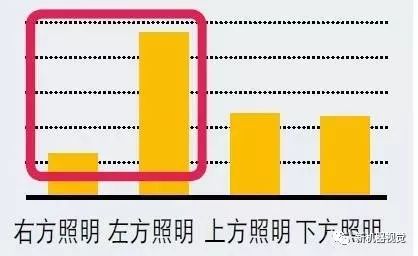
1、超高速执行来自不同方向的照明亮灯&拍摄
上方照明图像:
右方照明图像:
左方照明图像:
下方照明图像:
2、分析各像素的亮度值变化情况,并在分离“形状(凹凸)”、“纹理(图样)”后,进行图像化处理
纹理图像:
形状图像:
像素A 的亮度值:
像素B 的亮度值:
像素C 的亮度值:
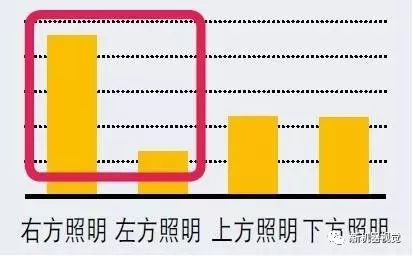
像素D 的亮度值:
如何避免明暗变化带来的影响,仅检测出异物?
可应对变化的2 种外观检测
瑕疵
检测稳定性“一目了然”的业界标准外观检测工具
该工具可在与周围浓淡等级进行比较的同时检测瑕疵和污点等缺陷。不仅具备卓越的检测能力,还可仅筛选出大小、浓度、形状、个数等要检测的缺陷。
胶囊的污点检测

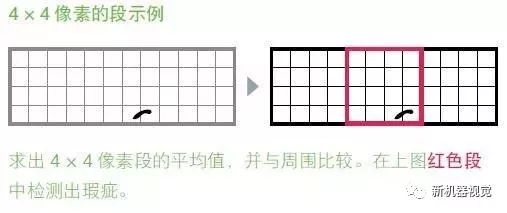
【瑕疵模式】原理
视觉系统使用感光元件CCD 每个像素的浓度(亮度)数据,将浓度的变化检测为瑕疵/ 边缘。但是,以1 像素为单位全部进行处理,需要花费大量的处理时间,且对检测无用的干扰数据还会影响结果。在此,视觉系统使用多个像素的小单位平均值进行处理。瑕疵模式中使用“段”这一小单位与周围平均浓度进行比较,检测出瑕疵。
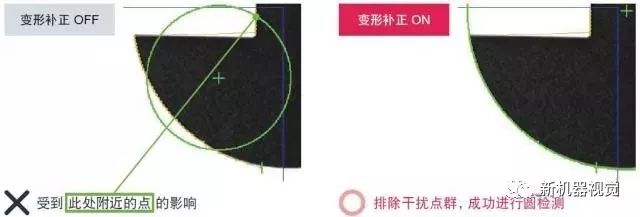
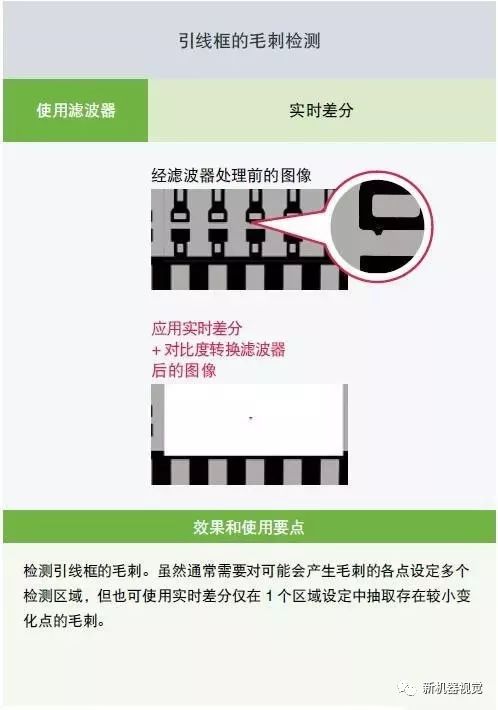
趋势边缘缺陷
最适合毛刺/ 缺陷检测的轮廓缺陷检测工具
该工具可从工件边缘抽取轮廓,将与该轮廓线差别较大的部分识别为毛刺/ 缺陷。以最多5000 点的边缘信息为基准,不仅支持圆或直线检测,还支持由椭圆或自由曲线构成的复杂形状轮廓的检测。
塑料瓶凹陷检测
通过多点信息,准确检测出细微凹陷
【趋势边缘缺陷】原理
电容器的毛刺检测
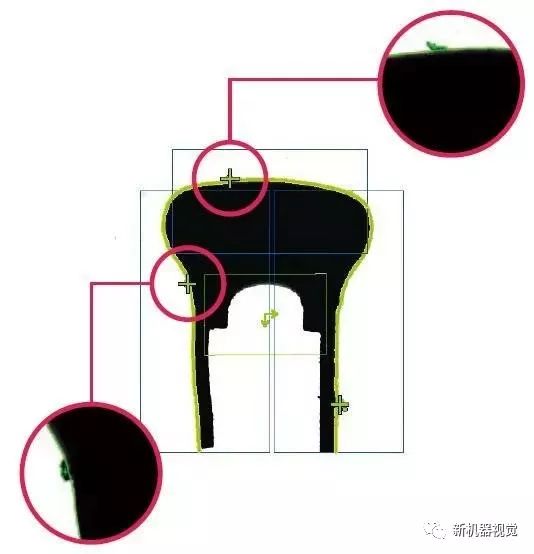
1、沿着工件形状,最多可检测出5000 点边
缘。(线上的圆点为边缘检测点)
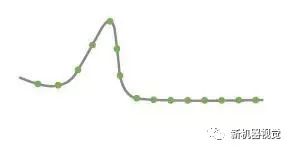
2、在1测量的边缘点中推定并检测出作为工件轮廓的基准模型线

3、将距基准模型线一定距离的边缘点检测为不良(毛刺/ 缺陷)
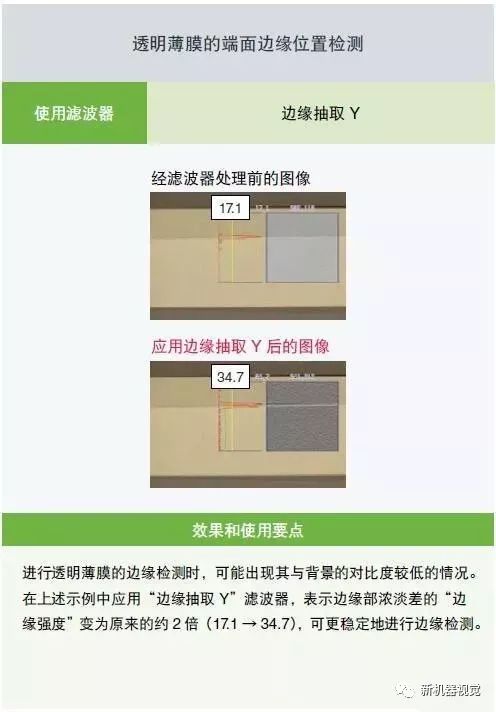
在亮度变化较大的地方,如何实现稳定检测?
边缘强度100% 补正
边缘模式
该位置检测工具可通过“边缘强度波形”确认检测稳定性
设定时,可一边观看边缘强度波形一边调整边缘检测等级。另外,在实际生产线中,为稳定边缘将始终进行补正,保持微分绝对值最大为100%,这样即使产生亮度变化,内部也将以相同条件进行检测。
【边缘】原理
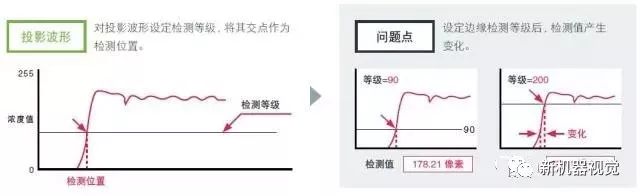
检测方法1
对投影处理后的波形设定检测等级的方法
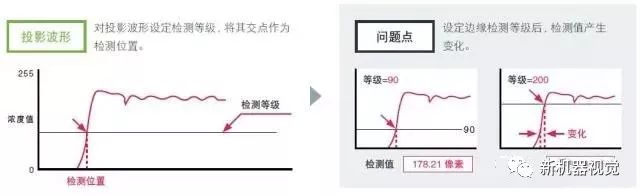
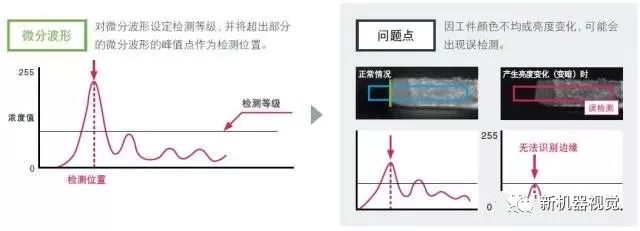
检测方法2
对微分波形设定检测等级的方法(不进行100% 补正时)
检测方法3
保持边缘强度最大值为100% 的补正方法
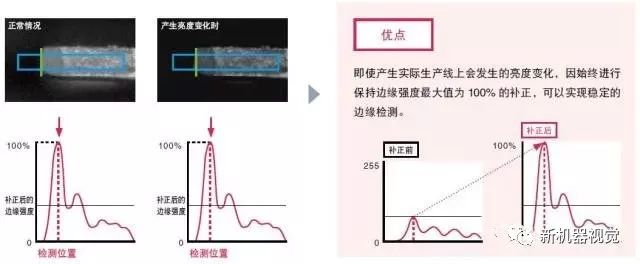
检测边缘时需要求出微分波形,为了保持实际生产线中检测稳定,始终进行保持微分值最大值为100%的补正。对于补正后的波形将“边缘敏感度(%)”设置为边缘检测阈值,因此即使绝对亮度产生变化,也可保持内部以相同条件进行检测,边缘检测稳定。
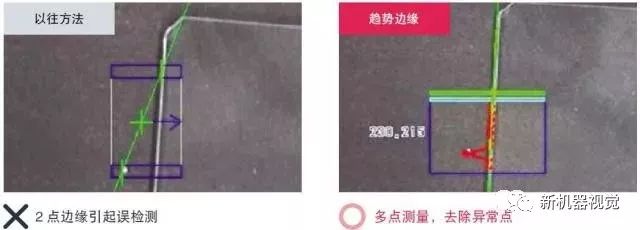
边缘位置不稳定产生误抓取时怎么办?
最多5000 点的边缘检测
趋势边缘模式
趋势边缘位置、宽度、缺陷的3 种模式
通过多条检测出的边缘位置信息可以求出虚拟直线或虚拟圆,用于位置检测、角度检测等。可消除异常的位置数据,进行稳定检测。
直线检测
圆检测
利用趋势边缘的3 种检测模式
趋势边缘位置
通孔中心检测
可通过各检测点判定,求出虚拟直线或虚拟圆用于运算。
趋势边缘宽度
电容器的尺寸测量
执行2 种趋势边缘处理,求出段之间的宽度。还可以检测直径等。
趋势边缘缺陷
瓶盖的毛刺检测
以检测点为基础求出基准线,并将与基准线的距离检测为缺陷。也可用于毛刺/ 缺陷检测。
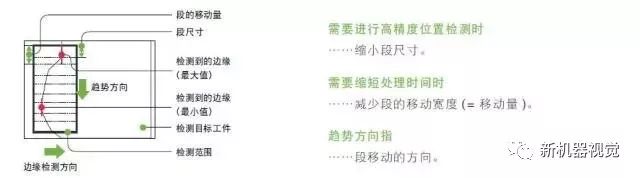
趋势边缘宽度
趋势边缘位置(宽度)模式可对检测区域内宽度较窄的边缘窗口进行扫描,同时检测出各点边缘位置。通过使用该检测模式,可在1个窗口中检测出多点边缘宽度,不放过目标工件的任何细微变化。
通过趋势边缘宽度进行最大外部尺寸检测
通过趋势边缘宽度进行最小内部尺寸检测
【趋势边缘】原理
使宽度较窄的区域段以较细的移动宽度(移动量)向趋势方向移动,检测各点的边缘宽度或边缘位置,并检测出最大值/ 最小值。另外,运算中可以使用全部点的检测值。
如何在图像不稳定的情况下进行准确的形状搜索?
如何在图像不稳定的情况下进行准确的形状搜索?
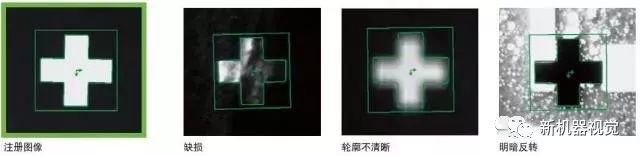
ShapeTrax
在恶劣条件下,追求处理能力、高速、高精度的搜索工具
该工具可使用从对象抽取的轮廓形状信息进行搜索。即使搜索对象产生缺陷或对比度降低、大小变化等,也可稳定搜索。作为其他工具的位置偏移补正源,也可发挥卓越的搜索能力。
ShapeTrax 特点
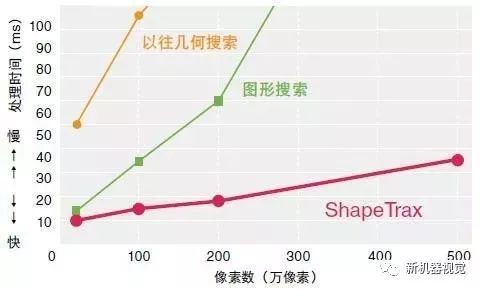
超高速处理
通过改善处理算法,实现比以往快10 倍的大幅度高速化。此外,即使是500 万像素等大容量图像,也可稍微增加处理速度,实现较高速的处理。
CCD 像素数和搜索处理时间(角度范围±180 度)
CV-X100 系列的评估数据
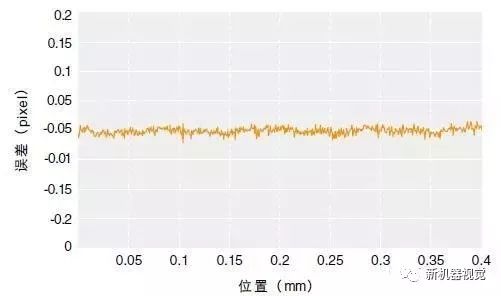
超高精度
直线性和重复精度皆已实现0.025 像素的业界超高等级。满足因对象的细微化和高精度化而提升搜索精度的需求。
直线性数据(代表例)
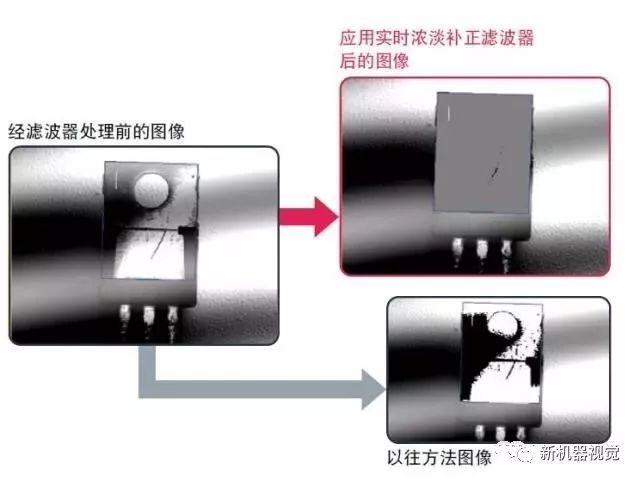
结合图像的预处理功能,实现更稳定的检测
支持对比度低的工件(使用预处理功能)
ShapeTrax 的特点之一为支持对比度低的工件,加上利用CV-X/XG 系列独有的预处理功能“实时浓淡补正”,即可检测出如下图片所示的2 种定位标记(大圆圈和小圆形)。重点在于通过预处理去除周期性阴影,和ShapeTrax 针对对比度低工件的检测能力。
【ShapeTrax】原理
轮廓形状搜索的重点在于如何抽取工件的轮廓信息实现高精度搜索,以及使用大量轮廓信息时如何实现高速处理。
ShapeTrax 为了解决以上问题,执行多级处理。
1、粗劣搜索
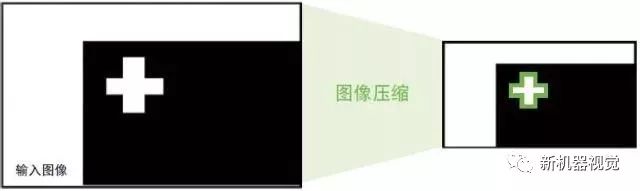
根据设定确定压缩率,从压缩的图像中得出轮廓图形,并在压缩图像内进行搜索,先检测出大致位置。因信息量较少,可以实现高速搜索。
2、精细搜索
锁定在粗略搜索中检测的位置周边,再得出无压缩的轮廓图形进行搜索。使用不压缩的全部像素信息,可实现高精度搜索。由此,通过粗略搜索锁定大致位置,并通过精细搜索检测出最终位置,使得hapeTrax 实现了高速性和高精度的并存。
通过有无/ 辨别或个数计算保持检测稳定的诀窍是?
根据对象选择检测项目
面积模式
进行面积检测的简单检测工具
面积检测方法又称面积二值化处理,通过统计黑白二种像素数,检测是否有应检测出的部分。
贴片电容有无检测
检测压纹带内有无贴片电容。对检测区域进行黑白二值化处理,对计算出的面积设定公差。
方便面调料包有无检测
检测方便面有无料包和汤包。使用1 台控制器即可控制多列检测,提高了运行效率。
密封胶带的有无/ 破损检测
检测密封胶带的有无/ 破损。可对检测范围内的胶带面积设定公差,进行检测。
效能说明书的有无检测
检测方便面有无料包和汤包。使用1 台控制器即可控制多列检测,提高了运行效率。
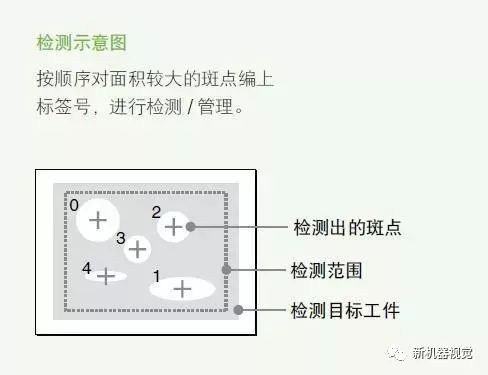
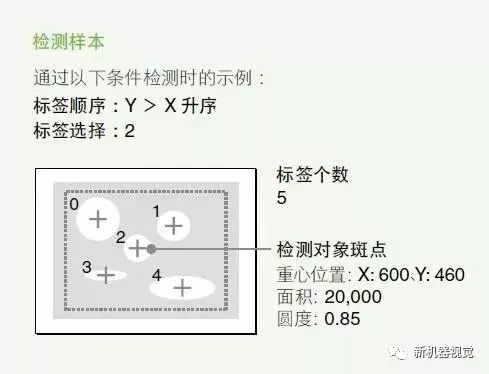
斑点模式
面积、周长、圆度、个数、重心位置等综合检测工具
斑点(blob)有“小块”的意思,在有无检测中指浓度相同的像素的集合体。根据集合体面积(像素数)等算出“斑点的特征量”,可检测要检测部分的有无。
药片个数计算
计算药片的个数。通过斑点处理计算区域内的药片个数,并对计算出的个数设定公差。
饮料瓶数量计算
使用500 万像素相机,即使在宽广视野下也能进行高精度检测。除计算个数之外,仅用1 台相机即可检测字符或颜色的细微区别,分辨瓶盖是否为同一品种等。
SD 卡数量计算
计算托盘内的SD 卡数量。使用高像素相机,还可以同时检测容量记录的不同等。
检测轴承内是否有润滑脂
检测轴承内是否有润滑脂。只要使用图像处理模式之一的“斑点”或“面积”,即可进行稳定检测。
如何在字符检测中即使刻印状态发生变化,也可稳定检测?
处理字符大小、位置、刻印品质、亮度变化
OCR(字符识别)
放心、准确的识别字符工具,将切割状态和稳定度可视化
本工具可识别产品上印刷、刻印的字符。为了应对作业现场时刻变化的刻印状态,基恩士致力于将字符切割、稳定度、字库等识别字符的重要因素可视化。

通过不使用二值化的灰度处理,即使周围亮度发生变化,也可稳定检测。此外,采用字符切割方式,可轻松掌握识别状态。
代表性用途示例
保质期印字检测
对食品容器上保质期的正误进行字符核对(OCV)
型号的字符识别
通过视觉系统对电子部件上的型号进行字符识别(OCR)。
【OCR(字符识别)】原理
视觉系统的字符识别可以逐一识别相机拍摄到的目标物上的字符,然后与内部预先注册的字库(字符字体群组)比对,形状最为一致的则识别为相应的字符。此外,通过将正确的字符串作为判定公差进行注册,对是否与已识别的字符串完全一致作出判定,然后输出OK/NG 的判定结果。另外,还可以将读取的字符串作为字符数据输出至外部设备。
自动字符切割设定
1、最大支持20 个字符/ 行,2 行/ 范围
2、根据独特的投影波形获取字符串的位置,自动调整切割范围
3、直接从灰度图像中切割,无需二值化处理,不易受亮度变化的影响
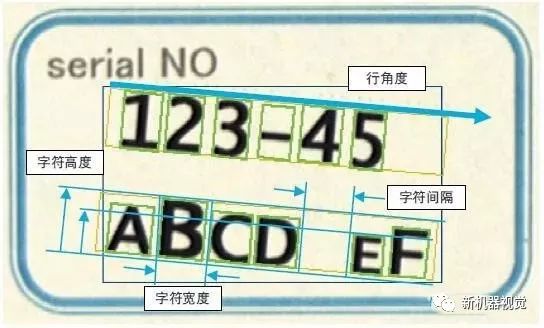
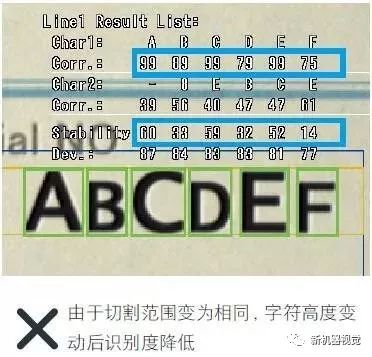
切割检测范围内字符的同时检测以下内容。与字库图形核对并进行补正,提高识别度。
1、行的角度旋转倾斜
2、字符高度偏差
3、字符间隔偏差
4、字符大小偏差
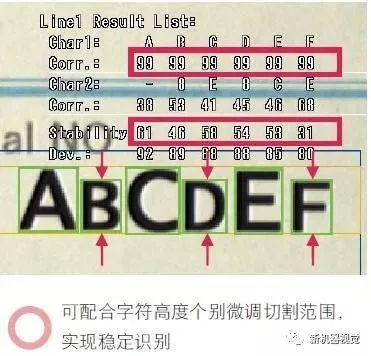
贴合切割功能
对于一同切割出的字符,会将每个字符微调至最佳的切割状态。
通过个别补正每个字符产生的细微变化并进行对照,以提高识别度。
贴合切割ON(标准规格)
贴合切割OFF
字符识别

如何检测出细微的表面颜色差异?
利用颜色信息稳定检测
颜色浓淡处理
生成处理了色相、饱和度、亮度全部信息的灰度图像
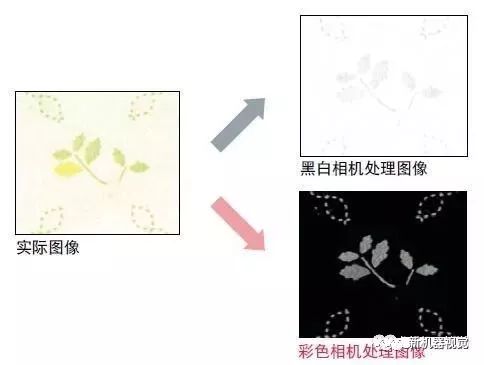
在颜色浓淡处理中,可将以往黑白相机无法分辨的图像转换为高对比度的灰度图像,实现稳定的图像处理检测。
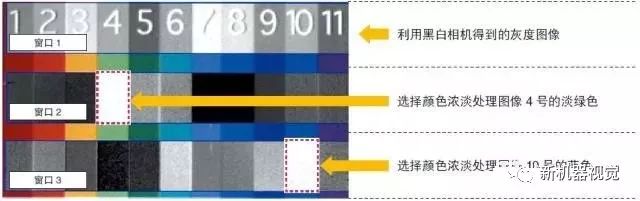
在窗口1 的灰度图像中,各颜色的对比度不明显,检测不稳定。窗口2、3 中,通过颜色浓淡处理,可以仅准确抽取特定颜色。即使是对比度较低的对象,也可转换为具有明显浓淡差的图像。
实际检测示例
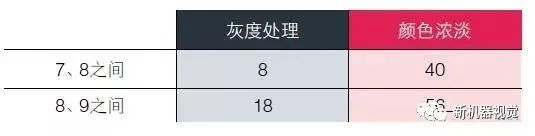
使用边缘检测功能检测8 号的宽度如左边2 幅图像所示。左边为灰度处理,右边为颜色浓淡。在颜色浓淡中得到8 和7、9 的对比度,在灰度处理中7 和8 几乎没有对比度,边缘检测也不稳定。表示边缘边界部变化强弱的边缘强度如下表所示,颜色浓淡处理一方较高。
颜色浓淡处理应用示例
镀金连接器的焊接位置检测
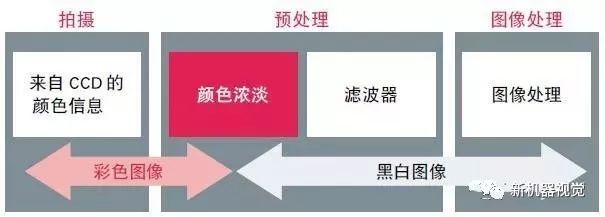
【颜色浓淡处理】原理
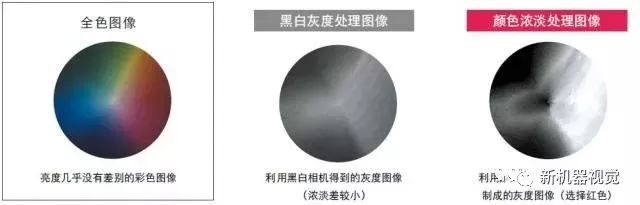
这种预处理方式可以将数据量大的彩色图像转换成以指定颜色为最高阶调亮度的256 阶调灰度图像。除亮度之外,还使用了颜色信息,支持进行金色和银色的辨别、浅色辨别等黑白相机难以检测的情况。
在检测左图所示的浅色图案时,如使用黑白浓淡处理,则只能得到非常淡的图像。但是采用基于颜色信息的颜色浓淡处理后,可以看到,背景成为黑色,淡色部位可以清晰地转换为灰色的图案。
在进行标记形状差异或位置偏移检查时,两种处理在效果上的差异一目了然。
如何消除微小干扰,强调微小变化?
预处理功能(基础篇)
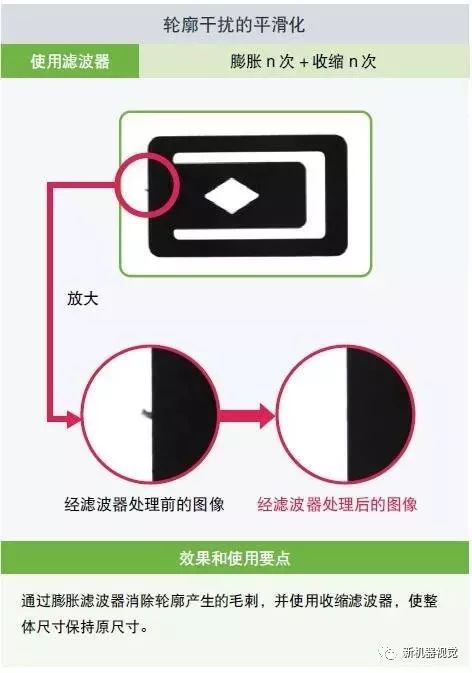
膨胀滤波器
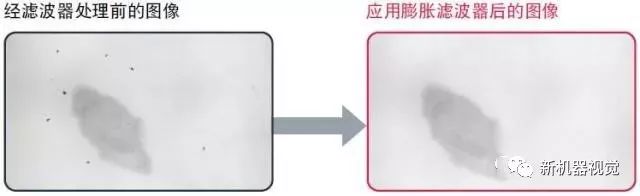
消除背景中黑色干扰成分的预处理功能
不单个使用,而是以相同次数多次应用膨胀→收缩,在维持原有形状的基础上消除干扰。
【膨胀滤波器】原理
膨胀滤波器的算法
在包含以3 × 3 中心像素浓度为中心的9 个像素中,替换为最大浓度的处理。有去除黑色干扰成分的效果。

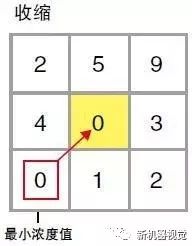
收缩滤波器的算法
在包含以3 × 3 中心像素浓度为中心的9 个像素中,替换为最小浓度的处理。具有强调黑色像素、稳定检测出黑点等瑕疵的效果。
重点:
不单个使用,通过相同次数的膨胀→收缩动作,在维持原有形状的基础上,只去除黑色的毛边形状。
各种预处理功能
如何不受背景影响进行检测?
预处理功能(应用篇)
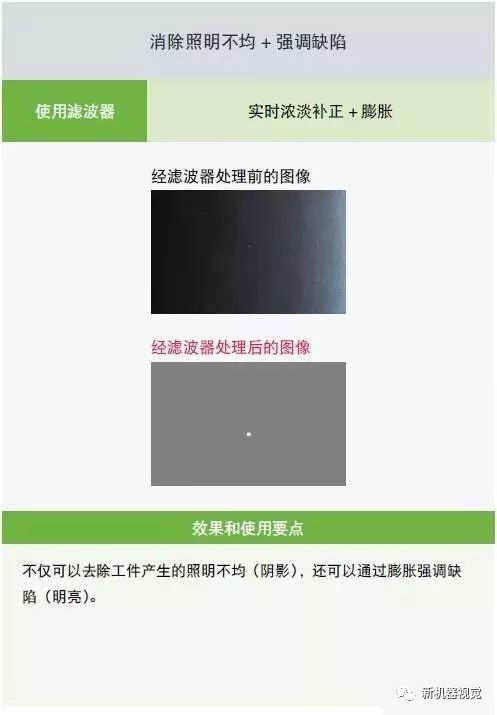
实时浓淡补正
消除渐变的浓淡变化,可以仅抽取缺陷的预处理功能
取消工件表面产生的阴影或不均匀光量,补正为最适合检测的图像。即使每次浓淡状况均发生变化,仍可实时执行补正,并仅抽取缺陷部。
【实时浓淡补正滤波器】原理
1、制作推定背景图像
根据参数抽取低于指定抽取尺寸的缺陷,推定最佳背景图像。
2、从输入图像中减去推定背景图像
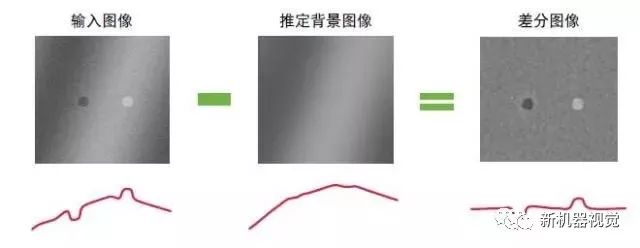
3、调整图像至最佳状态
图像的最佳调整可通过选择明缺陷、暗缺陷的对象缺陷颜色,或提升增益/ 去除干扰,将差分图像调整到更适合于检测的图像。
各种预处理功能


如何使任何人都可以迅速对焦或调节亮度?
实现“在任何时候,任何地方都相同”
拍摄环境再现导航
使位置、亮度、焦点返回导入初始状态的实用功能
在沿用生产线时的初期调整、相机移动后进行重新调整等情况下,可无需变更检测程序,任何人都可准确且迅速地进行调整。
通过拍摄环境再现导航一举解决!
可在如下情况中使用。
● 横向沿用生产线时
● 向国外出口装置并在当地组装使用时
● 运行中频繁出现误判定时
● 操作错误导致相机位置或焦点移动时
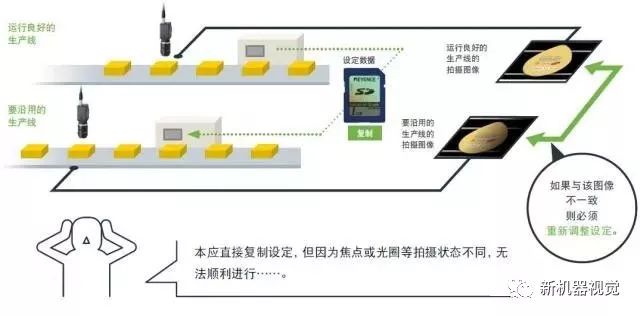
拍摄环境再现导航
可再现运行良好的相邻生产线
可将输入图像的拍摄状态与基准图像的拍摄状态匹配。
● 在沿用到新的生产线时,与运行良好的生产线的基准图像匹配
● 与设定时的基准图像进行比较,确认“是否与以往的状态相同”。可灵活应用于上述场合。
位置调整
亮度调整
焦点调整

-
机器视觉系统在注塑行业的应用2014-06-09 2224
-
机器视觉系统应用成为检测行业主导潮流2014-06-13 2477
-
LabVIEW机器视觉基础系列汇总篇(含PDF)2015-01-22 136856
-
机器视觉系统原理及学习路线2019-07-21 7111
-
嵌入式在机器人视觉系统的应用2019-08-05 2813
-
服务机器人的视觉系统怎么设计?2020-04-07 3314
-
河源机器视觉系统可以做什么?2021-01-20 3490
-
机器视觉系统是指什么? 机器视觉系统的工作原理是什么?2021-07-16 3821
-
机器视觉系统是由哪些部分组成的2021-09-29 3022
-
机器足球视觉系统中的实时图像处理2009-06-03 585
-
机器视觉系统原理及基础知识2011-12-16 2160
-
应用机器视觉系统进行导航机器人的设计2018-09-30 7895
-
机器视觉系统包括哪些2023-06-29 1366
-
视觉系统的构成 机器视觉中常用的接口有哪些2023-09-05 1989
-
棱镜——机器视觉系统中常见的重要配件2025-01-15 886
全部0条评论

快来发表一下你的评论吧 !
