

关于无人机的机载任务载荷的问题探讨
电子说
描述
一、任务载荷的定义
1、无人机装载的实现无人机飞行要完成的特定任务的仪器、设备和分系统,统称为无人机的有效载荷(Payload),或者叫任务载荷(Mission Payload)。
2、属于无人机的核心部分,应该在无人机设计中起到主导地位。

二、载荷分类
(一)光电类:侦查监控、巡视;
(二)投放类:武器、人影、架线;
(三)获取类:大气监测、采样;
(四)其他:通信、实验、中继。
三、常用的光电传感器
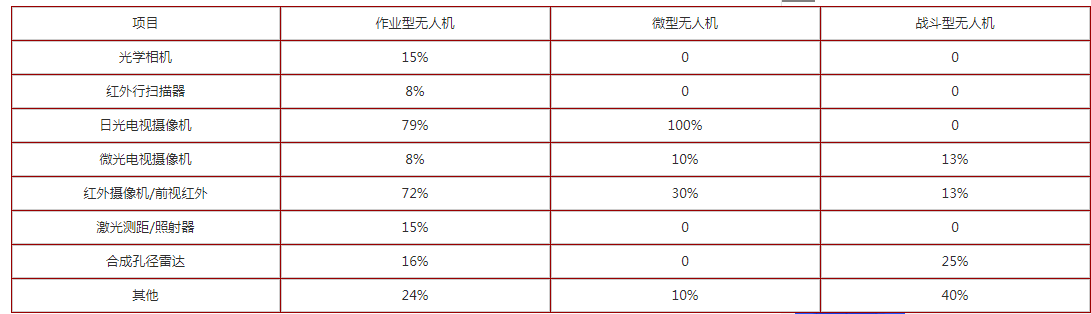
无人机的机载任务载荷是由无人机的尺寸和载重量以及任务需求所决定的。
常用的光电类任务载荷设备有可见光载荷、红外热像仪、紫外热像仪、合成孔径雷达、激光雷达以及多光谱相机等。
机载任务载荷根据无人机的不同用途而配置。
光电载荷的优点:
1、隐蔽性好。光电载荷采用电视或红外工作模式,能够主动或被动接收目标的形状、亮度和热辐射等信息,实现对目标的搜索跟踪。
2、探测精度高。光电载荷的测角精度可以达到毫弧度(mrad),而雷达的测角精度一般在度(°)的数量级
3、图像显示直观。光电载荷的显控台直接显示目标的几何图像或热图像,也容易实现对目标的自动跟踪。
4、设备少、质量轻。与雷达相比,光电载荷设备少、体积小、质量轻,而且采用模块化结构,便于组装维护,可靠性高。
四、可见光载荷
无人机可见光载荷主要分为光学相机和电视摄像机。
光学相机是一种经典的光学成像设备,也是最早装在无人机使用的侦察设备。其最大的优点是具有极高的分辨率,目前其他成像探测器还无法达到。
无人机上使用的电视摄像机应用广泛,其主要优点是体积小、质量轻、功效低、灵敏度高、抗冲击震动和寿命长。该载荷常和红外成像仪组成双光吊舱系统,满足全天候实时图像监测需要。
五、红外热像仪
通过探测目标的红外辐射,将目标的红外图形转换为可见光图形,发现并获取目标参数。
红外热像仪通常和电视跟踪器、激光测距器等组成综合探测系统,用于探测、跟踪目标,向火控计算机输送目标的方位、仰角、距离信息。在这种综合探测系统中,红外热像仪的主要作用是昼夜探测、监视、跟踪目标。{#Content_Pages#}
六、紫外热像仪
在高压设备电离放电时,根据电场强度(或高压差)的不同,会产生电晕、闪络或电弧。电离过程中,空气中的电子不断获得和释放能量。当电子释放能量即放电时,会辐射出光波和声波,还有臭氧、紫外线、微量的硝酸等。紫外成像技术,就是利用特殊的仪器接收放电产生的紫外线信号,经处理后成像并与可见光图像叠加,达到确定电晕的位置和强度的目的,从而为进一步评价设备的运行情况提供依据。
电晕是一种发光的表面局部放电,由于空气局部高强度电场而产生电离。该过程引起微小的热量,通常红外检测不能发现。红外检测通常是在高电阻处产生热点。紫外成像仪可以看到的现象往往红外成像仪不能看到,而红外成像仪可以看到的现象往往紫外成像仪不能看到。因此,紫外成像技术与红外成像技术是互补关系,紫外检测放电异常,红外检测发热异常,原理完全不同,各自具有不可互替的优点,检测目的、应用方法也各具特性。
(1)运行中绝缘子的劣化以及复合绝缘子及其护套电蚀检测;
(2)高压变电站及线路的整体维护;
(3)支柱式绝缘上的微观裂纹检测;
(4)悬挂式瓷绝缘中的零值绝缘子检测;
(5)评估绝缘设备表面的污秽程度;
(6)评估验收高压带电设备布局、结构、安装、设计是否合理;
(7)高压输变电设备上可能搭接的导电物体,如金属丝;
(8)大型发电机定子线棒端部和槽壁电晕放电检测;
七、合成孔径雷
合成孔径雷达(Synthetic Aperture Radar, SAR)通过向目标区域持续发射电磁脉冲,并接收来自目标区域的回波信号。首先对接收到的目标回波信号进行一些处理,通过成像技术得到目标区域中的形状。根据不同的工作模式,SAR可以分为条带式和聚束式两种。
八、激光雷达
LiDAR(Light Detection And Ranging),即激光探测与测量,是利用GPS(Global Position System)和IMU(Inertial Measurement Unit,惯性测量装置)机载激光扫描。其所测得的数据为数字表面模型(Digital Surface Model, DSM)的离散点表示,数据中含有空间三维信息和激光强度信息。应用分类(Classification)技术在这些原始数字表面模型中移除建筑物、人造物、覆盖植物等测点,即可获得数字高程模型(Digital Elevation Model, DEM),并同时得到地面覆盖物的高度。
九、多光谱相机
多光谱照相机是在普通航空照相机的基础上发展而来的。多光谱照相是指在可见光的基础上向红外光和紫外光两个方向扩展,并通过各种滤光片或分光器与多种感光胶片的组合,使其同时分别接收同一目标在不同窄光谱带上所辐射或反射的信息,即可得到目标的几张不同光谱带的照片。
多光谱照相机可分为三类:
(1)多镜头型多光谱照相机。它具有4-9个镜头,每个镜头各有一个滤光片,同时记录几个不同光谱带的图像信息;
(2)多相机型多光谱照相机。它是由几台照相机组合在一起,各台照相机分别带有不同的滤光片;
(3)光束分离型多光谱照相机。它采用一个镜头拍摄景物,用多个三棱镜分光器将来自景物的光线分离为若干波段的光束。
十、常用的光电设备——光电吊舱

1、光电吊舱原理
飞机要在空中完成对目标的探测和跟踪任务,需要一个机载平台和搭载一个在该平台上由探测设备组成的集成系统,在硬件表现形式上称之为吊舱。
根据内置设备的功能,机载吊舱可以分为导航吊舱、跟踪瞄准吊舱、红外测量吊舱、电子干扰吊舱及电子情报吊舱等。飞机上的精确制导武器主要靠飞机上的跟踪瞄准吊舱来指示目标。光电跟踪瞄准吊舱是一个光电成像跟踪系统,它的捕获、跟踪、瞄准(ATP)功能最后是通过跟踪伺服系统来完成的。这个跟踪伺服系统主要由光电传感器系统、信号处理和控制系统和跟踪稳定系统(稳像系统)三个部分组成。
无人机光电吊舱是无人机吊舱中的一种,一般由可见光相机、红外机芯、信号处理单元、图像压缩单元、稳定平台单元等组成,有拍照和摄像的功能,可实现全天候对远距离目标的追踪、摄像、监控。无人机光电吊舱运用的技术种类较多,并且根据功能不同,技术类型也略有不同,最常用的、具有代表性的技术有三种:红外热成像技术、数字图像处理技术、动态目标跟踪技术。
2、光电吊舱陀螺稳定系统
主要包括三大部分:
(1)主体仪器:稳像系统的主体仪器是两轴支撑的常平架结构,内环(水平环)用于安装光电测量仪器,外环(方位环)垂直安装在基座上。两环的转动轴正交,两环上分别安装一只二自由度挠性陀螺仪,通过锁定回路构成速率陀螺,用以测量两轴的转动角速度。
(2)控制放大器:控制放大器根据操作指令和跟踪目标的脱靶量控制两环上的驱动电机转动,使测量仪器的光轴始终对准目标。
(3)脱靶量计算单元:脱靶量计算单元根据光电跟踪仪器测量的图像,计算目标的脱靶量,输入控制器作为系统位置环的输入量。
3、图像处理技术
基于图像信息的目标跟踪,简称为图像跟踪,是以图像处理技术为核心,有机融合了计算机技术、传感器技术、模式识别、人工智能等多种理论和技术的新型的目标识别跟踪技术。它依靠成像技术,可以获取更加丰富的目标信息、有极强的抗干扰能力、以及良好的全天候作战能力。能够利用目标与真实空间信息之间的相互关系,有效地减小机动估计延时、提高跟踪性能。因此,这种基于图像传感器及图像处理的直接机动估计方法具有广阔的发展前景。图像跟踪基本上可分为波门跟踪、相关跟踪、基于目标运动模型的滤波器跟踪三种方式,其中以第三种跟踪方式应用最为广泛,效果最好。
无人机光电吊舱主要应用于森林消防、农业、环保、应急、电力巡检等领域,其中电力巡检,消防部门(包括消防、森林防火的过),武警、公安应急救援部门是目前需求量最大的三个领域。随着无人机市场的快速发展,以及无人机应用领域的不断拓宽,无人机光电吊舱市场需求量不断增长,行业未来仍有较大的发展空间,发展前景看好。中国企业应该与高校、研究机构进行联合,推进“产学研”一体的技术研发策略,为企业提供技术支持,降低技术投入成本,同时推动国内无人机光电吊舱技术水平的提高。
编辑:hfy
-
无人机机载高光谱成像系统的应用及优势2024-08-15 2787
-
红外无人机载荷核心指标——SWaP2024-03-29 2108
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 4709
-
无人机应用深度报告2023-10-25 3443
-
无人机载电源转换模块推荐2023-06-09 2011
-
无人机结构与系统2022-09-07 1720
-
无人机仿真总体概述2021-09-15 1995
-
无人机云台是什么2021-09-01 10602
-
无人机载成像光谱仪的详细介绍2021-08-20 3316
-
无人机云台电机是什么电机?2021-05-25 4386
-
全球首个IEEE1937.1无人机载荷接口标准促进无人机产业的发展2021-02-25 2189
-
航模/无人机遥控的解决方案2020-07-03 3481
-
国际无人机的新闻2020-05-12 2092
-
无人机遥感技术2016-03-11 8180
全部0条评论

快来发表一下你的评论吧 !
