

ZYNQ常用外设设计:malloc与memcpy的使用方法
描述
作者:Wilson Qiu,Xilinx工程师
ZYNQ对Memory的操作
参考工程见“ZYBO_Memory_GPIO_Interrupt_demo.xpr”。
ZYNQ有专用的DDR Controller接口,如果外部硬件连接了DDR器件,于是在ZYNQ Processing System中正确配置了相应的信号和参数后,DDR就可以成为ZYNQ的内存,在SDK中可以直接使用memcpy、memset以及类似的函数对于Memory空间进行操作。
Step1:查看ZYBO的原理图,找到相应的配置。ZYBO原理图中与DDR相关的部分如图 49所示。
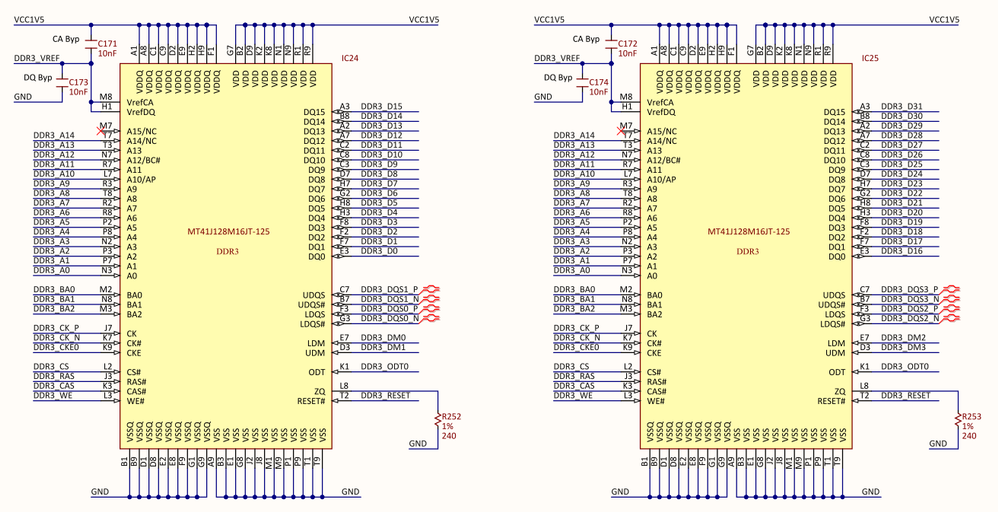
图 49
于是得到两个信息,第一个所使用的芯片是MT41J128M16JT-125,第二个是两片DDR3颗粒是通过位拼接完成的,也就是数据位宽为32bit。
Step2:在Block Design中对DDR部分的参数进行配置。

图 50
Step3:完成Block Design设计,产生Bitstream,导入SDK。

图 51
Step4:在SDK中编写Memory测试代码。
#include
#include
#include "platform.h"
#include "xil_printf.h"
#include "xil_types.h"
#include "xil_io.h"
int main()
{
u32 test_src[100];
int i;
int readback;
init_platform();
u32 *result = (u32*) malloc(sizeof(u32) * 100);
if (result) {
memset(result, 0, sizeof(u32) * 100);
} else {
return 0;
}
for(i=0;i<99;i++)
{
test_src[i]=i;
}
memcpy(result,test_src,100 * sizeof(u32));
for(i=0;i<100;i++)
{
readback = Xil_In32(result+i);
其中特别需要学习的就是malloc与memcpy的使用方法。
ZYNQ中MIO/EMIO GPIO的使用
参考工程见“ZYBO_Memory_GPIO_Interrupt_demo.xpr”。
MIO是PS端的外部引脚,共有54个;EMIO是PL端的外部引脚,共有64个。ZYNQ支持通过配置将PS的控制器信号通过EMIO输出,例如PS自带的UART Controller,如果正常选择引脚只能选择MIO引脚输出,但是通过设置可以选择连接到EMIO引脚。同时EMIO引脚也可以作为PS端的扩展引脚,即经过扩展PS一共可以控制118个引脚。
该例程演示将4个EMIO设置为PS的扩展引脚,这4个EMIO连接着LED。于是,与“将用户逻辑设计封装成IP”中的实验相比,同样是控制外部4个LED,就不需要另外设计一个逻辑模块,并封装成IP作为PS的外设了,可以直接通过SDK的程序进行控制。
注意:
1. 用于扩展GPIO的EMIO和用于扩展外设的EMIO是完全独立的,GPIO的EMIO共有64个,由2个bank组成,如图 52所示。
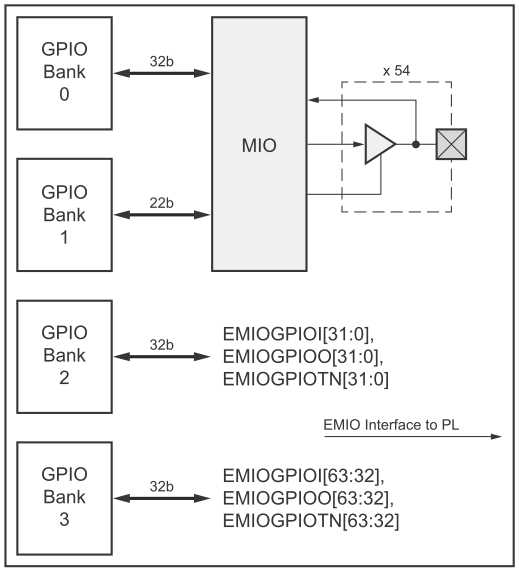
图 52
2. EMIO的内部排序按照EMIO54、EMIO55... ... EMIO117,以此类推。有了EMIO的编号之后就与内部控制EMIO的寄存器一一对应;而EMIO在外部与外部引脚的对应关系又是可以通过管脚约束进行更改的。于是可以得出:不能通过EMIO的外部引脚的关系确定其内部寄存器的地址。工具对于EMIO GPIO的连接关系是按照从EMIO54开始依次向上排列。
Step1:在Block Design中加入ZYNQ7 Processing System,在ZYNQ7 Processing System配置中添加EMIO GPIO,如图 53所示。通过设置EMIO GPIO Width来选择扩展EMIO GPIO的个数,此时就完成了与内部寄存器之间的对应关系,规则就是从EMIO54开始向上排列。
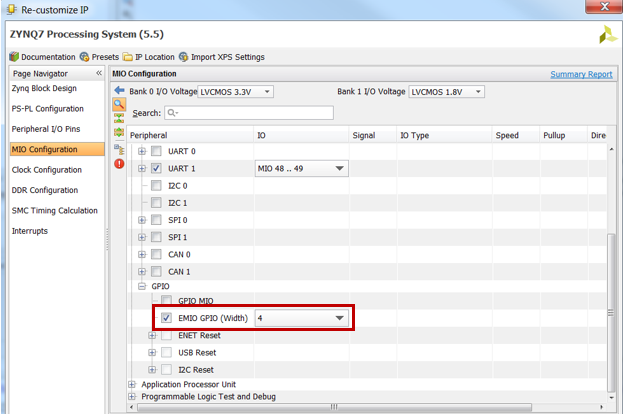
图 53
Step2:将ZYNQ的EMIO连接到外部引脚。右击生成的GPIO信号,点击Make External。

图 54
Step3:约束EMIO与外部引脚Pad的对应关系以及EMIO的电平标准。
方法有两种:
第一种是通过XDC约束文件进行约束,需要先将Block Design生成HDL Wrapper,这样才能知道其引脚名称。
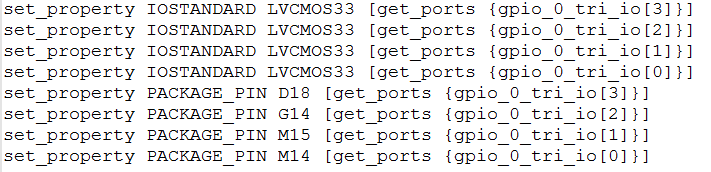
图 55
第二种方法就是Open Elaborated Design,在GUI中设置电平和引脚。

图 56
Step4:完成Block Design的综合、实现、生成Bitstream并导入SDK。
Step5:SDK中完成代码的编写,EMIO的代码编写需要包含的库文件是"xgpiops.h"。
#include "xgpiops.h"
static XGpioPs emio;
#define EMIO_54 54
#define EMIO_55 55
#define EMIO_56 56
#define EMIO_57 57
int main()
{
//定义GPIOPS型指针,用于初始化时绑定硬件
XGpioPs_Config *ConfigPtrPS;
init_platform();
//初始化GPIOPS,将ConfigPtrPS与硬件绑定
ConfigPtrPS = XGpioPs_LookupConfig(0);
XGpioPs_CfgInitialize(&emio, ConfigPtrPS,
ConfigPtrPS- > BaseAddr);
//设置EMIO的方向,并使能EMIO
XGpioPs_SetDirectionPin(&emio, EMIO_54, 1);
XGpioPs_SetOutputEnablePin(&emio, EMIO_54, 1);
XGpioPs_SetDirectionPin(&emio, EMIO_55, 1);
XGpioPs_SetOutputEnablePin(&emio, EMIO_55, 1);
XGpioPs_SetDirectionPin(&emio, EMIO_56, 1);
XGpioPs_SetOutputEnablePin(&emio, EMIO_56, 1);
XGpioPs_SetDirectionPin(&emio, EMIO_57, 1);
XGpioPs_SetOutputEnablePin(&emio, EMIO_57, 1);
while(1)
{
// 向EMIO写入数据,即驱动EMIO引脚
XGpioPs_WritePin(&emio, EMIO_54, 0x0);
XGpioPs_WritePin(&emio, EMIO_55, 0x0);
XGpioPs_WritePin(&emio, EMIO_56, 0x0);
XGpioPs_WritePin(&emio, EMIO_57, 0x0);
usleep(200000);
XGpioPs_WritePin(&emio, EMIO_54, 0x1);
XGpioPs_WritePin(&emio, EMIO_55, 0x1);
XGpioPs_WritePin(&emio, EMIO_56, 0x1);
XGpioPs_WritePin(&emio, EMIO_57, 0x1);
usleep(200000);
}
cleanup_platform();
return 0;
}
Step6:如果需要将EMIO作为输入端口,只需要将IO的方向设置为input。对于IO,作为输出的时候需要Enable,但是作为输入是永远使能的,不需要额外的Enable。具体代码如图 57所示。

图 57
补充说明:
MIO和EMIO都属于PS的GPIO,用于指示的变量类型为XGpioPs;而使用AXI_GPIO外设的GPIO,由于是属于PL的,所以指示这些IO的变量类型为XGpio。
MIO和EMIO的控制对于SDK是完全相同的,其地址偏移量也是排在一起的,MIO从0排到53,EMIO接着从54开始。示例代码中显示的是EMIO作为输出和MIO作为输入,只需要将引脚编号的宏定义改为需要的MIO或者EMIO编号即可使用。
在硬件配置时MIO的配置方法与EMIO有所不同,EMIO的配置如图 53所示。而MIO由于不像EMIO,外部管脚是确定的,所以可以在ZYNQ7 Processing System配置时同时完成属性以及电平的设置,如图 58所示。
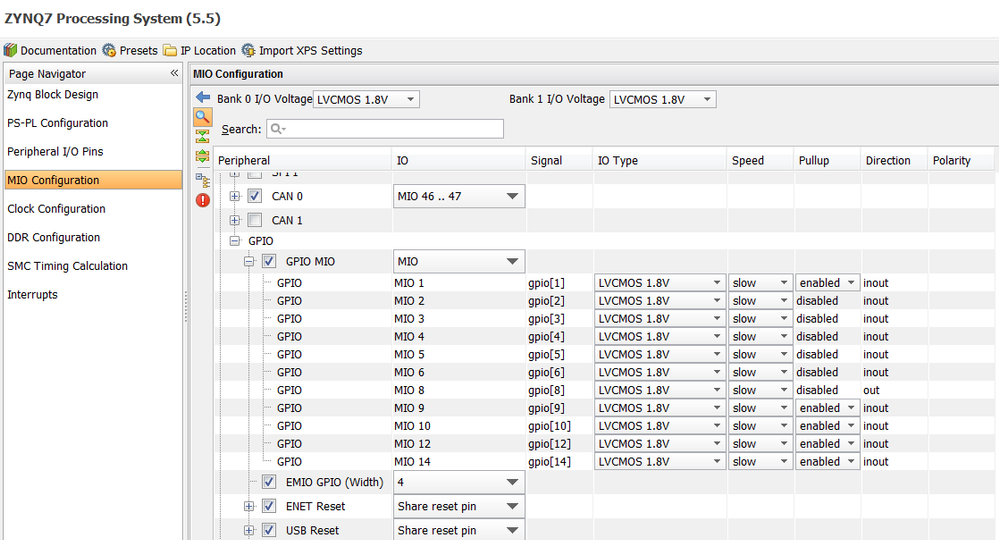
图 58
ZYNQ中Interrupt使用
参考工程见“ZYBO_Memory_GPIO_Interrupt_demo.xpr”。
ZYNQ中的中断管理是通过Generic Interrupt Controller(GIC)完成的。
任何的中断功能都需要两步,第一步是配置相应的中断,第二步是设置中断触发之后的服务函数。
配置相应中断分以下几个步骤:
1. 使能相应的功能,例如GPIO中断需要首先使能和配置GPIO;Timer中断需要首先使能和配置Timer;
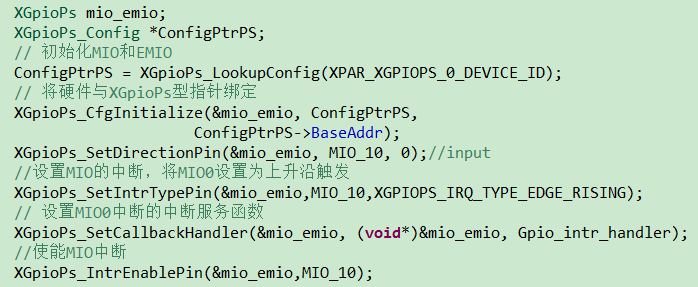
图 59
2. 初始化并配置使能GIC,还要使能异常处理。第1步中的操作对于每个中断源来说都不相同,但是这一步的配置对于不同中断源而言是类似的。不同之处在于有一个参数:中断ID,即例子中的52是变化的,52是GPIO的中断号,其他中端需要使用不同的ID。该值可以在UG585中断的相关章节查询到,如图 61所示。
另一个区别就是XScuGic_Connect时的服务子函数不同。
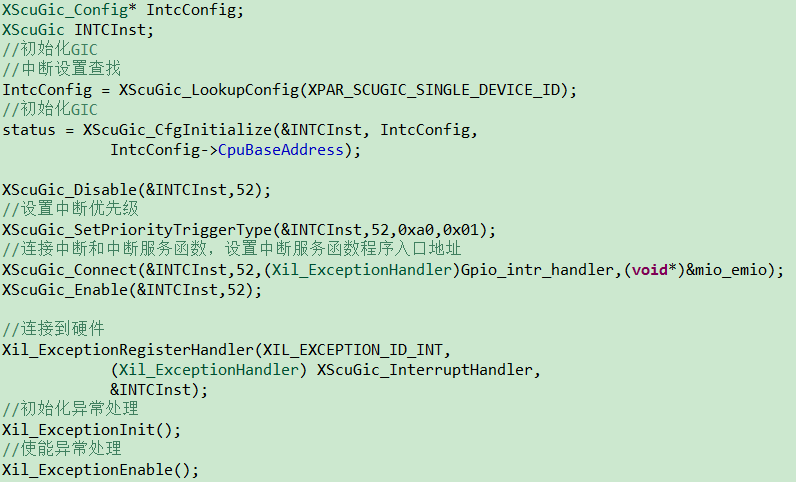
图 60

图 61
3. 编写中断服务函数,需要注意的是进入服务函数后首先需要禁止中断,保证在处理中断时不会再次因触发中断而程序跳转;另外就是需要清除中断标志位,否则会不断触发中断。

图 62
源代码见附件。
ZYNQ CPU内部任何有定时器,在Vivado的ZYNQ配置中无需任何操作就可以在SDK中直接使用。与GPIO中断类似,Timer的中断也包含相同的几步操作,下面给出各个阶段的代码片段,完整代码见附件。
1. 初始化Timer。

图 63
2. 初始化GIC,设置中断服务函数入口。

图 64
3. 配置Timer工作模式,导入计数初值,使能中断。
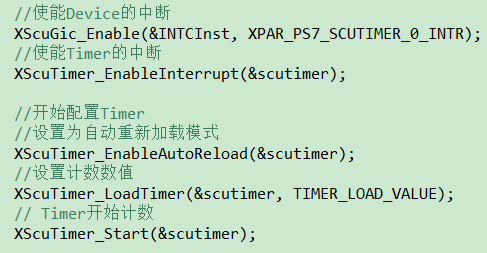
图 65
4. 编写中断服务函数,进入中断后首先Disable中断,清楚中断标志位;然后进行中断处理;退出中断服务函数前重新使能中断。

图 66
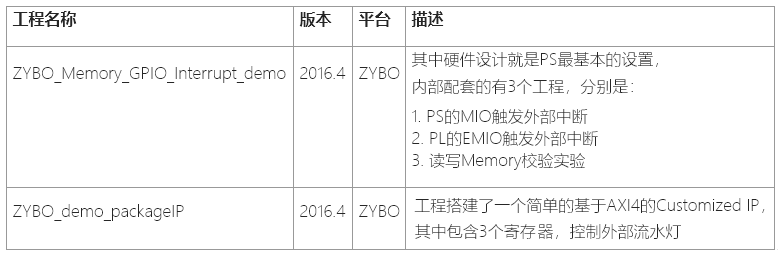
Appendix 1: 配套工程
编辑:hfy
-
TI mmWave Radar sensor硬件外设设计参考2024-09-27 452
-
ZYNQ常用外设设计 (上)2023-09-23 2623
-
AN4187 在STM32系列中CRC外设的使用方法2022-11-21 615
-
使用UART与ZYBO进行通信常用外设设计方案2020-11-03 4140
-
浅谈keil软件的使用方法2020-04-07 7038
-
SQL的常用命令使用方法详细说明2019-10-12 1929
-
如何为OTG外设设置批量输入/输出USB端点?2019-10-11 2079
-
memcpy怎么用_memcpy用法总结2017-11-28 48612
-
无线通信常用仪器仪表使用方法2017-01-24 1213
-
示波器探头常用附件的使用方法2017-01-22 1510
-
转:Keil的使用方法 - 常用功能(二)2016-06-13 3908
-
常用手机焊接工具使用方法2010-03-23 33376
全部0条评论

快来发表一下你的评论吧 !
