

深度学习中常用的几种卷积 不同情况下的卷积定义方式
电子说
描述
在本文中,我尽量使用简单明了的方式向大家解释深度学习中常用的几种卷积,希望能够帮助你建立学习体系,并为你的研究提供参考。
Convolution VS Cross-correlation
卷积是一项在信号处理、视觉处理或者其他工程/科学领域中应用广泛的技术。在深度学习中,有一种模型架构,叫做Convolution Neural Network。深度学习中的卷积本质上就是信号处理中的Cross-correlation。当然,两者之间也存在细微的差别。
在信号/图像处理中,卷积定义如下:

由上公式可以看出,卷积是通过两个函数f和g生成第三个函数的一种数学算子。对f与经过翻转和平移的g乘积进行积分。过程如下:
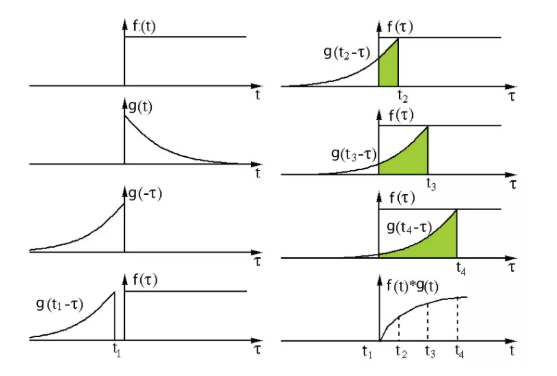
信号处理中的卷积。滤波器g首先翻转,然后沿着横坐标移动。计算两者相交的面积,就是卷积值。
另一方面,Cross-correlation被称为滑动点积或者两个函数的滑动内积。Cross-correlation中的滤波器函数是不用翻转的。它直接划过特征函数f。f和g相交的区域就是Cross-correlation。

在深度学习中,卷积中的滤波器不翻转。严格来说,它是Cross-correlation。我们基本上执行元素对元素的加法或者乘法。但是,在深度学习中,我们还是习惯叫做Convolution。滤波器的权重是在训练期间学习的。
Convolution in Deep Learning
卷积的目的是为了从输入中提取有用的特征。在图像处理中,有很多滤波器可以供我们选择。每一种滤波器帮助我们提取不同的特征。比如水平/垂直/对角线边缘等等。在CNN中,通过卷积提取不同的特征,滤波器的权重在训练期间自动学习。然后将所有提取到的特征“组合”以作出决定。
卷积的优势在于,权重共享和平移不变性。同时还考虑到了像素空间的关系,而这一点很有用,特别是在计算机视觉任务中,因为这些任务通常涉及识别具有空间关系的对象。(例如:狗的身体通常连接头部、四肢和尾部)。
The single channel version
单个通道的卷积在深度学习中,卷积是元素对元素的加法和乘法。对于具有一个通道的图像,卷积如上图所示。在这里的滤波器是一个3x3的矩阵[[0,1,2],[2,2,0],[0,1,2]]。滤波器滑过输入,在每个位置完成一次卷积,每个滑动位置得到一个数字。最终输出仍然是一个3x3的矩阵。(注意,在上面的例子中,stride=1,padding=0)
The muti-channel version
在很多应用中,我们需要处理多通道图片。最典型的例子就是RGB图像。

不同的通道强调原始图像的不同方面另一个多通道数据的例子是CNN中的层。卷积网络层通常由多个通道组成(通常为数百个通道)。每个通道描述前一层的不同方面。我们如何在不同深度的层之间进行转换?如何将深度为n的层转换为深度为m下一层?
在描述这个过程之前,我们先介绍一些术语:layers(层)、channels(通道)、feature maps(特征图),filters(滤波器),kernels(卷积核)。从层次结构的角度来看,层和滤波器的概念处于同一水平,而通道和卷积核在下一级结构中。通道和特征图是同一个事情。一层可以有多个通道(或者说特征图)。如果输入的是一个RGB图像,那么就会有3个通道。“channel”通常被用来描述“layer”的结构。相似的,“kernel”是被用来描述“filter”的结构。

layer和channel之间,filter和kernel之间的不同filter和kernel之间的不同很微妙。很多时候,它们可以互换,所以这可能造成我们的混淆。那它们之间的不同在于哪里呢?一个“Kernel”更倾向于是2D的权重矩阵。而“filter”则是指多个Kernel堆叠的3D结构。如果是一个2D的filter,那么两者就是一样的。但是一个3Dfilter,在大多数深度学习的卷积中,它是包含kernel的。每个卷积核都是独一无二的,主要在于强调输入通道的不同方面。
讲了概念,下面我们继续讲解多通道卷积。将每个内核应用到前一层的输入通道上以生成一个输出通道。这是一个卷积核过程,我们为所有Kernel重复这样的过程以生成多个通道。然后把这些通道加在一起形成单个输出通道。下图:
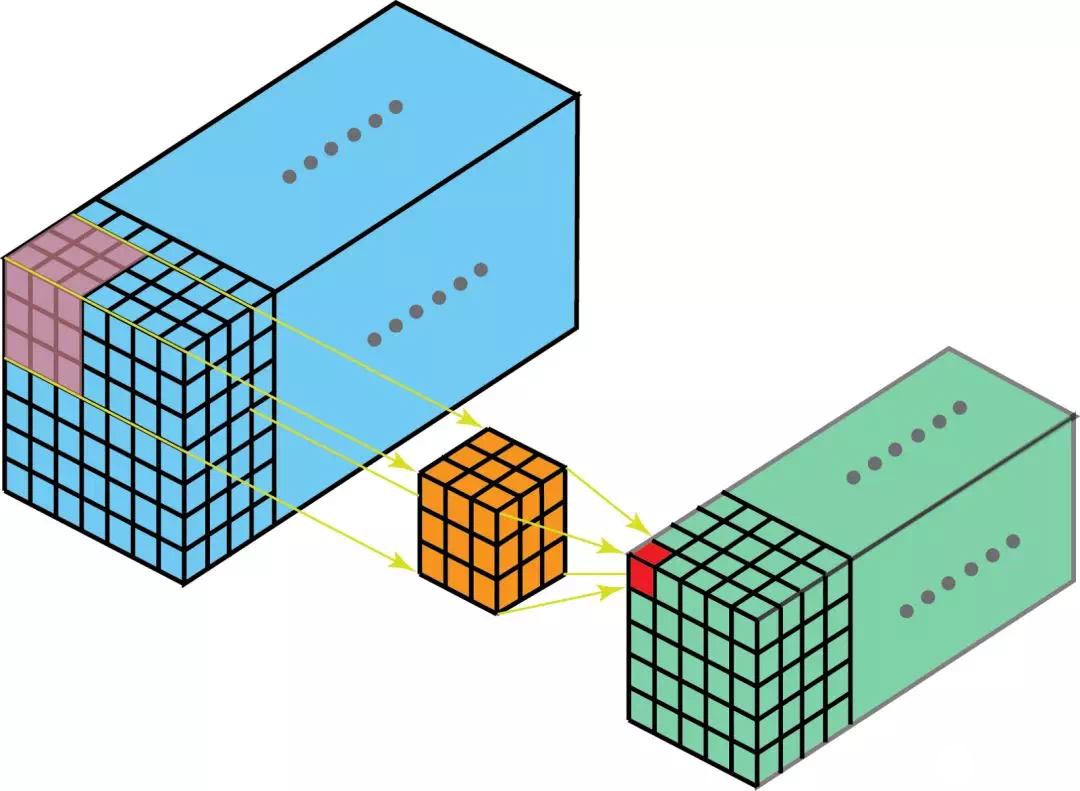
输入是一个5x5x3的矩阵,有三个通道。filter是一个3x3x3的矩阵。首先,filter中的每个卷积核分别应用于输入层中的三个通道。执行三次卷积,产生3个3x3的通道。
然后,这三个通道相加(矩阵加法),得到一个3x3x1的单通道。这个通道就是在输入层(5x5x3矩阵)应用filter(3x3x3矩阵)的结果。
同样的,我们可以把这个过程看作是一个3Dfilter矩阵滑过输入层。值得注意的是,输入层和单个filter有相同的深度(通道数量=单个filter中卷积核数量)。3Dfilter只需要在2维方向上移动,图像的高和宽。这也是为什么这种操作被称为2D卷积,尽管是使用的3D滤波器来处理3D数据。在每一个滑动位置,我们执行卷积,得到一个数字。就像下面的例子中体现的,(正方形的那个侧面 记为输入图片长宽, 长方形的侧面,这个长 便反应出深度 = 即 对应的 通道数是多少 )滑动水平的5个位置和垂直的5个位置进行。总之,我们得到了一个单一通道输出。

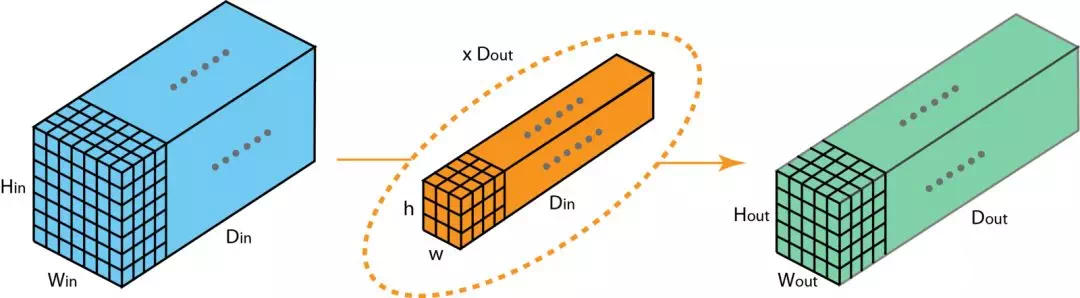
现在,我们一起来看看,如何在不同深度的层之间转换。假设输入层有xin个通道,我们想得到输出有Dout个通道。我们只需要将Dout 个 filters应用到输入层。每一个 filter有Din个卷积核。每个filter提供一个输出通道。完成该过程,将结果堆叠在一起形成输出层。
3D Convolution
在上一节的最后一个插图中,可以看出,这实际上是在完成3D卷积。但是在深度学习中,我们仍然把上述操作称为2D卷积。3D数据,2D卷积。滤波器的深度和输入层的深度是一样的。3D滤波器只在两个方向上移动(图像的高和宽),而输出也是一个2D的图像(仅有一个通道)。
3D卷积是存在的,它们是2D卷积的推广。在3D卷积中,滤波器的深度小于输入层的深度(也可以说卷积核尺寸小于通道尺寸)。所以,3D滤波器需要在数据的三个维度上移动(图像的长、宽、高)。在滤波器移动的每个位置,执行一次卷积,得到一个数字。当滤波器滑过整个3D空间,输出的结果也是一个3D的。
和2D卷积能够编码2D域中的对象关系一样,3D卷积也可以描述3D空间中的对象关系。3D关系在一些应用中是很重要的,比如3D分割/医学图像重构等。
1x1 Convolution
下面我们来看一种有趣的操作,1x1卷积。
我们会有疑问,这种卷积操作真的有用吗?看起来只是一个数字乘以输入层的每个数字?正确,也不正确。如果输入数据只有一个通道,那这种操作就是将每个元素乘上一个数字。
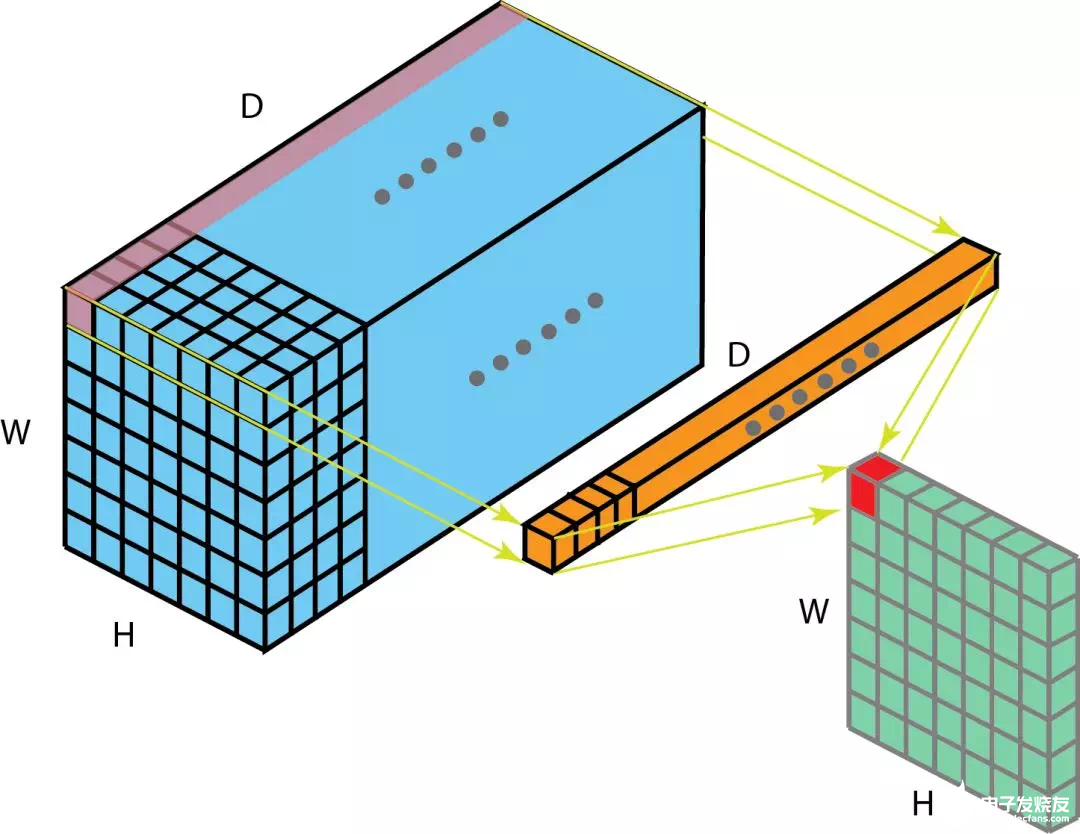
但是,如果输入数据是多通道的。那么下面的图可以说明,1 x 1卷积是如何工作的。输入的数据是尺寸是H x W x D,滤波器尺寸是1 x 1x D,输出通道尺寸是H x W x 1。如果我们执行N次1x1卷积,并将结果连接在一起,那可以得到一个H x W x N的输出。
1 x 1卷积在论文《Network In Network》中提出来。并且在Google发表的《Going Deeper with Convolution》中也有用到。1 x 1卷积的优势如下:
- 降低维度以实现高效计算
- 高效的低维嵌入,或特征池
- 卷积后再次应用非线性
前两个优势可以从上图中看出。完成1 x 1卷积操作后,显著的降低了depth-wise的维度。如果原始输入有200个通道,那么1 x 1卷积操作将这些通道嵌入到单一通道。第三个优势是指,在1 x 1卷积后,可以添加诸如ReLU等非线性激活。非线性允许网络学习更加复杂的函数。
Convolution Arithmetic
现在我们知道了depth维度的卷积。我们继续学习另外两个方向(height&width),同样重要的卷积算法。一些术语:
Kernel size(卷积核尺寸):卷积核在上面的部分已有提到,卷积核大小定义了卷积的视图。
Stride(步长):定义了卷积核在图像中移动的每一步的大小。比如Stride=1,那么卷积核就是按一个像素大小移动。Stride=2,那么卷积核在图像中就是按2个像素移动(即,会跳过一个像素)。我们可以用stride>=2,来对图像进行下采样。
Padding:可以将Padding理解为在图像外围补充一些像素点。padding可以保持空间输出维度等于输入图像,必要的话,可以在输入外围填充0。另一方面,unpadded卷积只对输入图像的像素执行卷积,没有填充0。输出的尺寸将小于输入。
下图是2D卷积,Kernel size=3,Stride=1,Padding=1:

这里有一篇写得很好的文章,推荐给大家。它讲述了更多的细节和举了很多例子来讲述不同的Kernel size、stride和padding的组合。这里我只是总结一般案例的结果。
输入图像大小是i,kernel size=k,padding=p,stride=s,那么卷积后的输出o计算如下:

编辑:hfy
-
深度学习中的卷积神经网络模型2024-11-15 1785
-
深度学习中反卷积的原理和应用2024-07-14 6967
-
卷积神经网络的基本概念、原理及特点2024-07-11 3766
-
卷积神经网络训练的是什么2024-07-03 2181
-
深度学习与卷积神经网络的应用2024-07-02 2413
-
卷积神经网络的应用 卷积神经网络通常用来处理什么2023-08-21 6905
-
简谈卷积—幽默笑话谈卷积2023-05-25 985
-
浅析卷积降维与池化降维的对比2023-02-17 2222
-
信号与系统中卷积分析和总结2021-09-29 44663
-
深度学习中的卷积神经网络层级分解综述2021-05-19 1376
-
解析深度学习:卷积神经网络原理与视觉实践2020-06-14 3565
-
卷积神经网络—深度卷积网络:实例探究及学习总结2020-05-22 3528
-
卷积神经网络四种卷积类型2019-04-19 5142
-
探析深度学习中的各种卷积2019-02-26 4317
全部0条评论

快来发表一下你的评论吧 !
