

еҹәдәҺArduinoе’Ңи¶…еЈ°жіўдј ж„ҹеҷЁйҒҝйҡңе°ҸиҪҰеҲ¶дҪңж–№жЎҲ
жҸҸиҝ°
йҒҝйҡңе°ҸиҪҰжҳҜдёҖз§ҚжҷәиғҪи®ҫеӨҮпјҢеҸҜд»ҘиҮӘеҠЁж„ҹзҹҘеүҚж–№зҡ„йҡңзўҚзү©пјҢ并йҖҡиҝҮжңқеҸҰдёҖдёӘж–№еҗ‘иҪ¬еҠЁжқҘйҒҝејҖйҡңзўҚзү©гҖӮиҜҘи®ҫи®Ўе…Ғи®ёе°ҸиҪҰйҖҡиҝҮйҒҝе…Қзў°ж’һеңЁжңӘзҹҘзҺҜеўғдёӯеҜјиҲӘпјҢиҝҷжҳҜд»»дҪ•иҮӘ主移еҠЁе°ҸиҪҰзҡ„дё»иҰҒиҰҒжұӮгҖӮйҒҝйҡңе°ҸиҪҰзҡ„еә”з”ЁдёҚеҸ—йҷҗеҲ¶пјҢзҺ°еңЁеӨ§еӨҡж•°еҶӣдәӢз»„з»ҮйғҪдҪҝз”Ёе®ғпјҢиҝҷжңүеҠ©дәҺжү§иЎҢи®ёеӨҡеЈ«е…өж— жі•е®ҢжҲҗзҡ„еҚұйҷ©е·ҘдҪңгҖӮ
еңЁжң¬зҜҮж–Үз« дёӯпјҢжҲ‘们е°ҶдҪҝз”ЁArduinoе’Ңи¶…еЈ°жіўдј ж„ҹеҷЁеҲ¶дҪңдёҖдёӘйҒҝйҡңе°ҸиҪҰгҖӮиҝҷйҮҢпјҢи¶…еЈ°жіўдј ж„ҹеҷЁз”ЁдәҺйҖҡиҝҮи®Ўз®—жңәеҷЁдәәе’ҢйҡңзўҚзү©д№Ӣй—ҙзҡ„и·қзҰ»жқҘж„ҹжөӢи·Ҝеҫ„дёӯзҡ„йҡңзўҚзү©гҖӮеҰӮжһңжңәеҷЁдәәеҸ‘зҺ°д»»дҪ•йҡңзўҚзү©пјҢе®ғдјҡж”№еҸҳж–№еҗ‘并继з»ӯ移еҠЁгҖӮ
и¶…еЈ°жіўдј ж„ҹеҷЁеҰӮдҪ•з”ЁдәҺйҒҝе…ҚйҡңзўҚзү©
еңЁеҲ¶дҪңд№ӢеүҚпјҢдәҶи§Ји¶…еЈ°жіўдј ж„ҹеҷЁзҡ„е·ҘдҪңеҺҹзҗҶйқһеёёйҮҚиҰҒпјҢеӣ дёәиҝҷз§Қдј ж„ҹеҷЁеңЁжЈҖжөӢйҡңзўҚзү©ж–№йқўиө·зқҖйҮҚиҰҒдҪңз”ЁгҖӮи¶…еЈ°жіўдј ж„ҹеҷЁе·ҘдҪңзҡ„еҹәжң¬еҺҹзҗҶжҳҜи®°еҪ•дј ж„ҹеҷЁеңЁж’һеҮ»иЎЁйқўеҗҺдј иҫ“и¶…еЈ°жіўжқҹе’ҢжҺҘ收超声波жқҹжүҖйңҖзҡ„ж—¶й—ҙгҖӮ然еҗҺдҪҝз”ЁиҜҘе…¬ејҸи®Ўз®—и·қзҰ»гҖӮеңЁжң¬ж–ҮдёӯпјҢдҪҝз”ЁдәҶе№ҝжіӣдҪҝз”Ёзҡ„HC-SR04и¶…еЈ°жіўдј ж„ҹеҷЁгҖӮ
еӣ жӯӨпјҢHC-SR04зҡ„Trigеј•и„ҡй«ҳиҮіе°‘10 usгҖӮеЈ°жіўжқҹд»Ҙ8дёӘ40KHzзҡ„и„үеҶІдј иҫ“гҖӮ
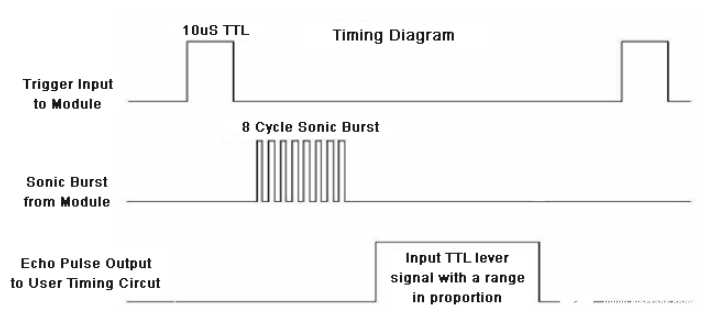
然еҗҺдҝЎеҸ·ж’һеҮ»иЎЁйқўе№¶иҝ”еӣһ并з”ұHC-SR04зҡ„жҺҘ收еҷЁEchoеј•и„ҡжҚ•иҺ·гҖӮ Echoеј•и„ҡеңЁеҸ‘йҖҒй«ҳз”өе№іж—¶дёәй«ҳз”өе№ігҖӮ
е…үжқҹиҝ”еӣһжүҖз”Ёзҡ„ж—¶й—ҙдҝқеӯҳеңЁеҸҳйҮҸдёӯпјҢ并дҪҝз”ЁеҰӮдёӢжүҖзӨәзҡ„йҖӮеҪ“и®Ўз®—иҪ¬жҚўдёәи·қзҰ»
и·қзҰ»=пјҲж—¶й—ҙxз©әж°”дёӯеЈ°йҹізҡ„йҖҹеәҰпјҲ343 m / sпјүпјү/ 2
еҸҜиҪ»жқҫжүҫеҲ°йҒҝе…ҚжңәеҷЁдәәзҡ„йҡңзўҚзү©зҡ„组件гҖӮдёәдәҶжҗӯе»әеә•зӣҳпјҢеҸҜд»ҘдҪҝз”Ёд»»дҪ•зҺ©е…·еә•зӣҳжҲ–иҖ…еҸҜд»Ҙе®ҡеҲ¶гҖӮ
йңҖиҰҒзҡ„组件
в—ҸВ В Arduino NANOжҲ–UnoејҖеҸ‘жқҝ
в—ҸВ В HC-SR04и¶…еЈ°жіўдј ж„ҹеҷЁ
в—ҸВ В LM298Nз”өжңәй©ұеҠЁеҷЁжЁЎеқ—
в—ҸВ В 5VзӣҙжөҒз”өеҠЁжңә
в—ҸВ В з”өжұ
в—ҸВ В иҪҰиҪ®
в—ҸВ В жңәеЈі
в—ҸВ В и·ізәҝ
з”өи·ҜеҺҹзҗҶеӣҫ
йҒҝйҡңе°ҸиҪҰзҡ„Arduinoзј–зЁӢ
еңЁжң¬ж–Үжң«е°ҫеӨ„е°Ҷз»ҷеҮәдәҶе®Ңж•ҙзЁӢеәҸгҖӮиҜҘзЁӢеәҸе°ҶеҢ…жӢ¬и®ҫзҪ®HC-SR04жЁЎеқ—并е°ҶдҝЎеҸ·иҫ“еҮәеҲ°з”өжңәеј•и„ҡд»Ҙзӣёеә”ең°з§»еҠЁз”өжңәж–№еҗ‘гҖӮжӯӨйЎ№зӣ®дёӯдёҚдјҡдҪҝз”Ёд»»дҪ•еә“гҖӮ
йҰ–е…ҲеңЁзЁӢеәҸдёӯе®ҡд№үHC-SR04зҡ„TRIGе’ҢECHOеј•и„ҡгҖӮеңЁжң¬ж–ҮдёӯпјҢtrigеј•и„ҡиҝһжҺҘеҲ°GPIO9пјҢechoеј•и„ҡиҝһжҺҘеҲ°Arduino NANOзҡ„GPIO10гҖӮ
int trigPin = 9;В В В В // trig pin of HC-SR04
int echoPin = 10;В В В В // Echo pin of HC-SR04
В
е®ҡд№үз”ЁдәҺиҫ“е…ҘLM298Nз”өжңәй©ұеҠЁеҷЁжЁЎеқ—зҡ„еј•и„ҡгҖӮ LM298Nжңү4дёӘж•°жҚ®иҫ“е…Ҙеј•и„ҡпјҢз”ЁдәҺжҺ§еҲ¶иҝһжҺҘеҲ°е®ғзҡ„з”өжңәж–№еҗ‘гҖӮ
int revleft4 = 4;В В В В //REVerse motion of Left motor
int fwdleft5 = 5;В В В В //ForWarD motion of Left motor
int revright6 = 6;В В В В //REVerse motion of Right motor
int fwdright7 = 7;В В В В //ForWarD motion of Right motor
В
LM298Nз”өжңәй©ұеҠЁеҷЁжЁЎеқ—
еңЁsetup()еҮҪж•°дёӯпјҢе®ҡд№үдҪҝз”Ёзҡ„GPIOеј•и„ҡзҡ„ж•°жҚ®ж–№еҗ‘гҖӮеӣӣдёӘз”өжңәеј•и„ҡе’ҢTrigеј•и„ҡи®ҫзҪ®дёәиҫ“еҮәпјҢEchoеј•и„ҡи®ҫзҪ®дёәиҫ“е…ҘгҖӮ
pinMode(revleft4, OUTPUT);В В В В // set Motor pins as output
pinMode(fwdleft5, OUTPUT);
pinMode(revright6, OUTPUT);
pinMode(fwdright7, OUTPUT);
pinMode(trigPin, OUTPUT);В В В В В В // set trig pin as output
pinMode(echoPin, INPUT);В В В В В В //set echo pin as input to capture reflected waves
В
еңЁloop()еҮҪж•°дёӯпјҢд»ҺHC-SR04иҺ·еҸ–и·қзҰ»е№¶ж №жҚ®и·қзҰ»з§»еҠЁз”өжңәж–№еҗ‘гҖӮи·қзҰ»е°ҶжҳҫзӨәжңәеҷЁдәәеүҚж–№зҡ„зү©дҪ“и·қзҰ»гҖӮйҖҡиҝҮе°Ҷи¶…еЈ°жіўжқҹеҸ‘е°„иҮі10 us并еңЁ10usеҗҺжҺҘ收жқҘиҺ·еҸ–и·қзҰ»гҖӮ
digitalWrite(trigPin, LOW);
delayMicroseconds(2);В В
digitalWrite(trigPin, HIGH);В В В В // send waves for 10 us
delayMicroseconds(10);
duration = pulseIn(echoPin, HIGH); // receive reflected waves
distance = duration / 58.2;В В // convert to distance
delay(10);
В
еҰӮжһңи·қзҰ»еӨ§дәҺе®ҡд№үзҡ„и·қзҰ»ж„Ҹе‘ізқҖе…¶и·Ҝеҫ„дёӯжІЎжңүйҡңзўҚзү©е№¶дё”е®ғе°Ҷеҗ‘еүҚ移еҠЁгҖӮ
if (distance > 19)В В В В В В В В
{
digitalWrite(fwdright7, HIGH);В В В В В В В В В В В В В В // move forward
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, HIGH);В В В В В В В В В В В В В В В В В В В В В В
digitalWrite(revleft4, LOW);В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В В
}
В
еҰӮжһңи·қзҰ»е°ҸдәҺ规е®ҡзҡ„и·қзҰ»д»ҘйҒҝејҖйҡңзўҚзү©ж„Ҹе‘ізқҖеүҚж–№еӯҳеңЁдёҖдәӣйҡңзўҚзү©гҖӮеӣ жӯӨпјҢеңЁиҝҷз§Қжғ…еҶөдёӢпјҢжңәеҷЁдәәе°ҶеҒңжӯўдёҖж®өж—¶й—ҙ并еңЁжӯӨд№ӢеҗҺеҗ‘еҗҺ移еҠЁеҶҚж¬ЎеҒңжӯўдёҖж®өж—¶й—ҙпјҢ然еҗҺиҪ¬еҗ‘еҸҰдёҖдёӘж–№еҗ‘гҖӮ
if (distance < 18)
{
digitalWrite(fwdright7, LOW);В В //StopВ В В В В В В В В В
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);В В В В В В В В В В В В В В В В В В В В В В
digitalWrite(revleft4, LOW);
delay(500);
digitalWrite(fwdright7, LOW);В В В В //movebackwordВ В В В В В
digitalWrite(revright6, HIGH);
digitalWrite(fwdleft5, LOW);В В В В В В В В В В В В В В В В В В В В В В
digitalWrite(revleft4, HIGH);
delay(500);
digitalWrite(fwdright7, LOW);В В //StopВ В В В В В В В В В
digitalWrite(revright6, LOW);
digitalWrite(fwdleft5, LOW);В В В В В В В В В В В В В В В В В В В В В В
digitalWrite(revleft4, LOW);В В
delay(100);В В
digitalWrite(fwdright7, HIGH);В В В В
digitalWrite(revright6, LOW);В В
digitalWrite(revleft4, LOW);В В В В В В В В В В В В В В В В В В В В В В
digitalWrite(fwdleft5, LOW);В В
delay(500);
}
зј–иҫ‘пјҡhfy
-
AGVе°ҸиҪҰйҒҝйҡңи¶…еЈ°жіўжөӢи·қдј ж„ҹеҷЁйҖүеһӢжҢҮеҚ—пјҡеҰӮдҪ•жҢ‘йҖүйҖӮй…Қзҡ„йҒҝйҡңжҺўеӨҙ2026-06-27 140
-
AGVе°ҸиҪҰиҮӘеҠЁйҒҝйҡңи¶…еЈ°жіўдј ж„ҹи§ЈеҶіж–№жЎҲ2026-06-24 103
-
AGVеҰӮдҪ•еҲ©з”Ёи¶…еЈ°жіўдј ж„ҹеҷЁе®һзҺ°жҷәиғҪйҒҝйҡң2026-06-23 240
-
и¶…еЈ°жіўжөӢи·қдј ж„ҹеҷЁеңЁз§»еҠЁжңәеҷЁдәәйҒҝйҡңеҜјиҲӘдёӯзҡ„еә”з”Ё2026-06-22 139
-
дҪҝз”Ёи¶…еЈ°жіўдј ж„ҹеҷЁе’ҢArduinoжһ„е»әдёҖдёӘйҒҝйҡңжңәеҷЁдәә2022-09-08 4815
-
еҰӮдҪ•еҲ©з”Ёйқўеҗ‘еҜ№иұЎиҜӯиЁҖеҺ»и®ҫи®ЎдёҖеҸ°и¶…еЈ°жіўйҒҝйҡңarduinoе°ҸиҪҰе‘ў2022-03-01 1999
-
еҰӮдҪ•дҪҝз”ЁArduinoеҚ•зүҮжңәеҲ¶дҪңи¶…еЈ°жіў+зәўеӨ–зәҝжҷәиғҪйҒҝйҡңе°ҸиҪҰ2022-01-19 1245
-
еҰӮдҪ•еҺ»е®һзҺ°дёҖз§Қarduinoи¶…еЈ°жіўиҮӘеҠЁйҒҝйҡңе°ҸиҪҰеҲ¶дҪң2022-01-05 1786
-
stm32жҚ•иҺ·еҚ з©әжҜ”_еҹәдәҺSTM32и¶…еЈ°жіўйҒҝйҡңе°ҸиҪҰ2021-11-22 1603
-
еҰӮдҪ•е®һзҺ°иҲөжңә+и¶…еЈ°жіўйҒҝйҡңе°ҸиҪҰи“қзүҷйҒҘжҺ§2021-10-13 2093
-
е…ідәҺе…үз”өеҫӘиҝ№е’Ңи¶…еЈ°жіўйҒҝйҡңзҡ„е°ҸиҪҰи®ҫи®Ўд»Ӣз»Қ2018-07-10 5627
-
и¶…еЈ°жіўдј ж„ҹеҷЁеңЁжҷәиғҪе°ҸиҪҰйҒҝйҡңзі»з»ҹдёӯзҡ„еә”з”Ё2017-12-07 14893
-
еҹәдәҺArduinoеҚ•зүҮжңәзҡ„йҒҝйҡңе°ҸиҪҰжңәеҷЁдәә2017-11-29 1194
е…ЁйғЁ0жқЎиҜ„и®ә

еҝ«жқҘеҸ‘иЎЁдёҖдёӢдҪ зҡ„иҜ„и®әеҗ§ !
