

交流电动机仿真训练及实际设计电路图解析
电子说
描述
我们学习了交流电动机的工作原理以及特性,以下根据课本启动特性、调速特性、以及制动特性的知识进行仿真训练
一,根据仿真数据画出该电机的固有机械特性近似图
仿真图:

由仿真结果得知额定工作状态下,电动机转速为154.234rad/s,电磁转矩为11.5429Nm。
所以可得电动机理想空载转速:n0=60×50/2=1500r/min。
电动机额定转速:nN=154.234×60/2Π=1472.826r/min。
电动机额定转矩:TN=11.5429Nm。
电动机额定转速差:SN=(n0-nN)/n0=0.018116。
再根据转矩表达式:T=KSR2U2/(R22+(SX20)2)可以求出常数K=5.3712×10-3,其中R2=0.408Ω、X20=2Πf1LL2=0.792H、U=220V。
所以利用matlab可以画出上方转矩表达式的图像即异步电动机的固有机械特性图:
R2=0.408;
X=0.792;
K=0.00537;
U=220;
T=(K*((1500-N)。/1500)*R2*U^2)。/(R2^2+((1500-N)。/1500).^2*X^2);
N=0:1:1600;
plot(T,N,‘r-’);
xlabel(‘电磁转矩(Nm)’);
ylabel(‘转速(r/min)’);
title(‘异步电动机的固有机械特性’);
axis([0 200,0 1600]);
fT=max(T);
id=find(T==fT);
fN=N(id);
text(fT,fN,num2str(fT,‘%.2f’),‘FontSize’,18);

根据上图可以读出电动机的临界工作点时Tmax=164.08Nm,nm=728r/min。启动工作点时Tst=133.601Nm。
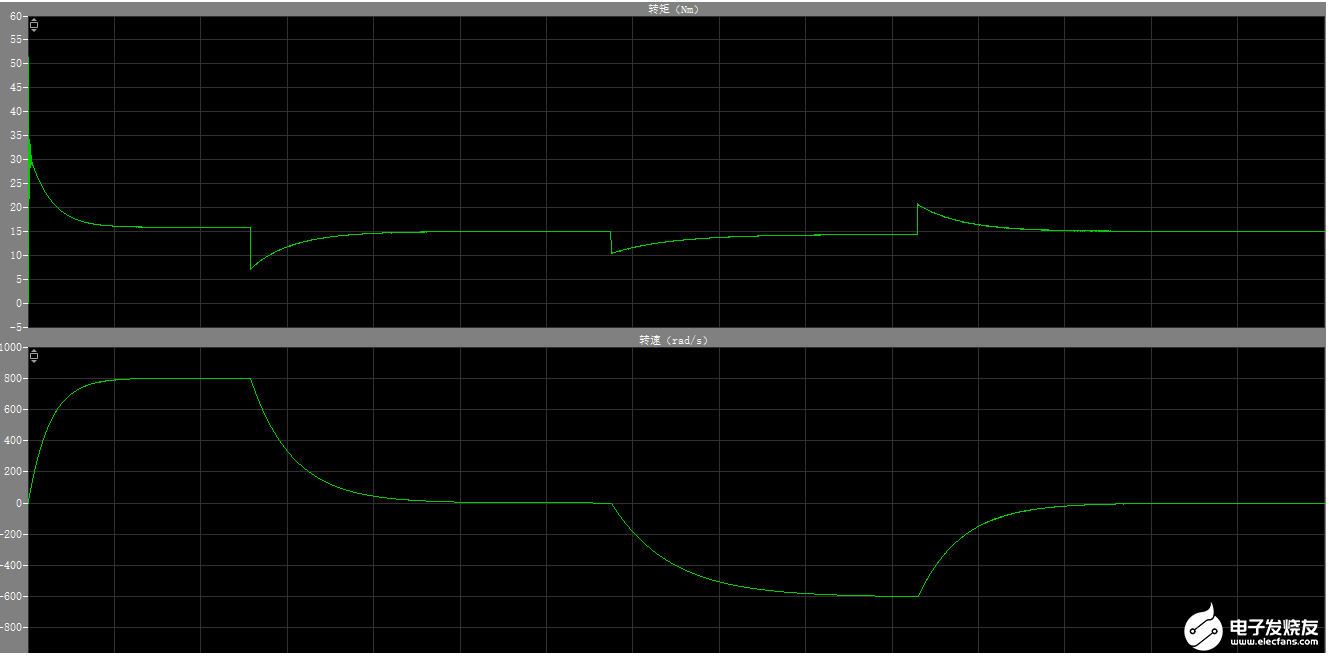
二,结合本周学习的交流电机原理及启动、调速、制动特性,在PLECS仿真环境下控制上述三相交流异步电机带动起重机起升机构运行。(改为绕线异步电动机)
启动阶段:采用逐级切除启动电阻法(转子电路串接电阻)
制动阶段:采用定子电压反接制动,当转速到达0时,转子上串接电阻使机械特性到达15Nm,n0=0点。
反向加速:仍然采用转子电路串接电阻的方法
实际设计电路图如下:

机械运动周期仿真结果图如下:
编辑:hfy
-
交流电动机的工作原理 交流电动机的调速方法2024-02-02 4065
-
交流电动机的工作原理 交流电动机需要换向器吗2024-01-19 2768
-
交流电动机和直流电动机的结构及工作原理2023-03-02 1147
-
请问交流电动机参数有哪些?2021-10-26 2198
-
交流电动机铭牌上的频率是多少2021-09-13 4897
-
单相交流电动机的检测方法2020-11-23 7886
-
交流电动机的工作原理2018-10-18 111106
-
交流电动机调速系统的分类_交流电动机调速方法有哪些2018-05-10 26494
-
交流电动机节能启动器电路图2009-05-26 1123
-
交流电动机的简易能耗制动2009-04-18 1303
-
交流电动机自动换向电路2009-02-12 1352
-
交流电动机传动调压调速控制2008-12-05 773
-
交流电动机的制动电路图2008-02-14 1822
-
利用交流电源和灯泡检查电动机三相绕组的头尾电路图2007-12-02 1177
全部0条评论

快来发表一下你的评论吧 !
