

基于Elman网络的过热汽温隐式广义预测控制
有线通信
描述
关键词:过热蒸汽温度 Elman网络 隐式广义预测控制(IGPC) 直接辩识 控制器参数
1 引言
过热蒸汽温度是电站锅炉运行质量的重要指标之一,过热蒸汽温度过高或过低都会显著地影响电厂的安全性和经济性。在锅炉运行中,必须保持过热汽温稳定在规定值附近。但是过热汽温的动态特性会随着负荷的变化而变化,同时它又是一个大时延,大惯性的环节[2]。采用传统的PID控制器很难获得满意的控制效果。广义预测控制吸收了预测控制与自适应控制的优点,利用对象的实际输出和已施加的输入对模型参数实时进行在线辩识与校正,可用于时变的动态系统[3]。但是求解最优控制增量需要在线递推求解Diophantine方程及进行多次矩阵求逆运算,使控制系统的计算量非常大,影响控制系统的实时性。本文提出了基于Elman网络的直接辩识控制器参数的隐式广义预测控制,不但极大地减少了控制系统的在线计算量,而且使对象动态性的建模及辩识容易实现。将其用于过热汽温控制系统仿真,结果表明系统具有良好的性能。
2 Elman回归神经网络预测模型
神经网络具有通过恰当选择网络层次和隐层单元数能够以任意精度逼近任意连续函数及其各阶导数的特性因而被广泛应用于工业过程的建模和控制。与静态前馈型神经网络不同,动态递归网络通过存储内部状态使其具备映射动态特征的功能,从而使系统具有适应时变特性的能力,更适合于动态系统的辩识[1]。代表了神经网络建模、辩识与控制的发展方向。
Elman型回归神经网络是动态递归神经网络的一种,它一般可分为四层:输入层、隐层、承接层、输出层(隐层单元数和承接层单元数相同),其输入层、隐层、输出层的连接类似于前馈网络。输入层的单元仅起信号传输作用,输出层单元起线性加权和作用。隐层单元可有线性和非线性激发函数,通常激发函数取为Sigmoid非线性函数。而承接层则用来记忆隐层单元前一时刻的输出值,可以认为是一个一步迟延的延时算子。
当Elman网络用于辨识单输入、单输出对象时,只需要一个输入单元和一个输出单元,隐层单元(设其数目为n个)的输入为n+1个,比相应的静态网络结构大大简化。此外,Elman网络的动态特性仅由内部的连接提供,无需使用状态作为输入或训练信号,单输入单输出的Elman回归网络结构如图1所示。

用y(k)表示k时刻的输出u(k)表示k时刻的输入,wc(k)表示k时刻隐层单元与承接层单元之间的连接权值,wu(k)表示k时刻隐层单元与输入单元之间的连接权值,wy(k)表示k时刻隐层单元与输出单元之间的连接权值。则网络可以描述为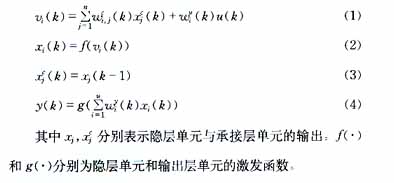
对Elman网络进行训练时,可采用BP算法、DBP算法等[6]。
3 基于神经网络的直接辩识控制器参数的隐式广义预测控制
直接辩识控制器参数的隐式广义预测控制仍属于模型预测控制的范畴,因此它仍具有模型预测控制的三大特征:预测模型、滚动优化、反馈校正。
3.1 预测模型
使用对象的实际输入输出数据对Elman网络进行训练后,就可以作为控制系统的预测模型。用以预测对象的输出。
设定多项式Fj
式中ym(k+j)表示对象在k+j时刻的预测输出。等号右边第一项为k及其以后时刻的输入对输出的影响,第二项为k时刻以前的输入对输出的影响,第三项为k及以前时刻的输出对未来输出的影响。
式中

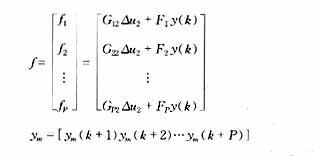
则可得出预测值的矩阵方程
3.2滚动优化
广义预测控制规律的优化目标是
ym(k+j)为模型预测输出值,yr(k+j)为输出期望值,qj,rj为非负加权系数,对具有纯迟延的对象,qj的前几个数值应取0,P为优化时域,M为控制域,M≤P(在本文中取P=M)。
3.3 反馈校正
基于神经网络的直接辩识控制器参数的隐式广义预测控制是一种闭环控制算法,在实际情况下由于二次输入、噪声及实际系统的时变等原因引起的模型预测输出与对象实际输出之间的差距,叫预测误差。将预测误差作为Elman网络的训练信号,用以调整网络的权值,使神经网络预测模型准确地反映对象的实时动态特性。
3.4 直接辩识控制器参数的算法
由式(9)可见,广义预测控制器在k时刻可求得预测最优控制增量Δu(k)、Δu(k+1)、…、Δu(k+P-1)。再由系统以前的输入输出数据便可得到φ(k)。将预测最优控制增量逐一输入到神经网络预测模型,便可得到预测输出ym(k+1)、ym(k+2)、
在每一时刻k都可求得P步预测值ym((k+P)/k)=φT(k)θ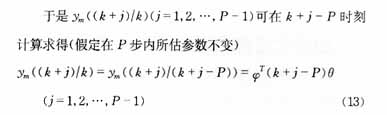

从而根据式(9)就可求得控制增量最优值Δu1。基于神经网络的直接辩识控制器参数的隐式广义预测控制结构如图2所示。

3.5 基于神经网络的直接辩识控制器参数的隐式广义预测控制算法归纳如下
①根据对象的实际输入输出数据离线训练Elman神经网络,将经过训练的Elman网络作为对象的预测模型。
②置初值P、M(在本文中P=M),m、n、R、Q,并收集对象的实际输入输出数据得到φ(k)、y(k+P)的初值。
⑤由式(9)计算控制律Δu(k)、Δu(k+1)、…、Δu(k+P-1),将Δu(k)施加于对象。
⑥根据对象的实际输出y(k)与模型的预测输出ym(k)之差在线修正神经网络的权值。使神经网络预测模型准确地反映对象的动态特性。
⑦将⑤中所求的控制律逐一送入神经网络预测模型,得到对象的预测输出ym(k+1)、ym(k+2)、…、ym(k+P)。
⑧收集系统以前的输入输出数据Δu(k-m)、Δu(k-m-1)、…、Δu(k-1)及y(k)、y(k-1)、…、y(k-n)和⑤、⑦中所得的数据。
⑨令k=k+1,返回③。
4 应用于过热汽温控制的仿真研究
现代电站对于过热汽温的调节一般采用串级汽温调节系统。用以仿真的被控对象导前区传递函数为:G01(s)= 被控对象的惰性区的传递函数为:G02(s)=
被控对象的惰性区的传递函数为:G02(s)= ,副控制器的传递函数为:GP(s)=2.3,主控制器的传递函数为:
,副控制器的传递函数为:GP(s)=2.3,主控制器的传递函数为: 由对象的惰性区的传递函数可见,惰性区的惯性及迟延都很大。而且,过热汽温的动态特性会随着锅炉负荷的变化而变化。所以此系统的控制效果欠佳。现将本文提出的NNIGPC加到控制系统中代替其主调节器,系统的其余部分保持不变。当外界施加给系统一个阶跃扰动时,系统的仿真结果如图3所示。
由对象的惰性区的传递函数可见,惰性区的惯性及迟延都很大。而且,过热汽温的动态特性会随着锅炉负荷的变化而变化。所以此系统的控制效果欠佳。现将本文提出的NNIGPC加到控制系统中代替其主调节器,系统的其余部分保持不变。当外界施加给系统一个阶跃扰动时,系统的仿真结果如图3所示。

当过热汽温的给定值发生阶跃变化时系统的仿真结果如图4所示。
从仿真结果可以看出,神经网络隐式广义预测控制(NNIGPC)无论在跟踪设定值还是抑制扰动方面都明显优于传统的PID控制器。

5 结论
本文所提出的基于神经网络的隐式广义预测控制通过直接辩识控制器参数求解最优控制增量,无需递推求解Diophantine方程及进行矩阵求逆运算,因而计算量小、实时性高,而且其控制性能优良。尤其对于象过热汽温这样时变、大时延、大惯性的对象能够满足在各种工况下对控制品质的要求,具有较强的实用性,有很好的应用前景。
参考文献:
[1]谢庆国,万淑芸,赵金.一种Elman回归网络的设计方法[J].华中科技大学学报,2002,30(3):22-24
[2]李遵基.热工自动控制系统[M].北京:中国电力出版社,1997,74-83
[3]王伟.广义预测控制理论及应用[M].北京:科学出版社,1998,148-154
[4]Sanaye Pasand M,Malik O P.High speed transmission system directional protection using an Elman network[J].IEEE,Trans.On Power Delivery,1998,13(4):1040-1045
[5]Clarke,D.W.,Mohtadi,C.and uffs.P.S.,Generalized Predictive control.Automation[J].1989,25(6):859-875
[6]PHAM D T,LIU X.Training of elman networks and dynamic system modeling[J].International Journal of Systems Science,1996,27(2):221-226
- 相关推荐
- 热点推荐
- Elman
-
模型预测控制+逻辑控制2021-08-17 1895
-
基于隐式广义预测的LNG出口压力控制仿真研究2017-11-09 1370
-
精馏塔广义预测控制器设计_关士远2017-02-07 607
-
广义预测控制理论及其应用2016-04-12 764
-
基于PLC的多变量广义预测控制模块设计2013-08-20 885
-
0045《广义预测控制理论及其应用》.pdf2012-12-29 2733
-
广义预测控制及在基于ARM的控制器中的实现2011-06-17 788
-
单边网络的NCS中针对网络丢包的广义预测控制2009-12-31 841
-
多变量广义预测控制在DCS系统中的应用2009-09-03 923
-
一种复合控制器在过热汽温中的应用研究2009-08-31 748
-
多变量广义预测控制的快速算法2009-07-31 916
-
基于灰色广义预测的自动控制系统2009-06-20 672
-
基于多模型的非线性系统广义预测控制2009-06-17 767
-
航空发动机T-S模型模糊广义预测控制算法设计2009-03-16 438
全部0条评论

快来发表一下你的评论吧 !
