

基于灵动微电子MM32F013x 系列的UART硬件自适应波特率
描述
嵌入式工程师在开发产品中经常会用到MCU的片上UART和其它模块进行通信,为了在某些非正常的恶劣环境下能正常使用串口通信,可能需要对UART通信波特率进行自适应校准,在我们之前的微课堂中讲解过关于MM32通用MCU的UART串口通信方面的基础知识,这里我们增加基于灵动微电子MM32F013x 系列UART硬件自适应波特率的使用。
1、原理
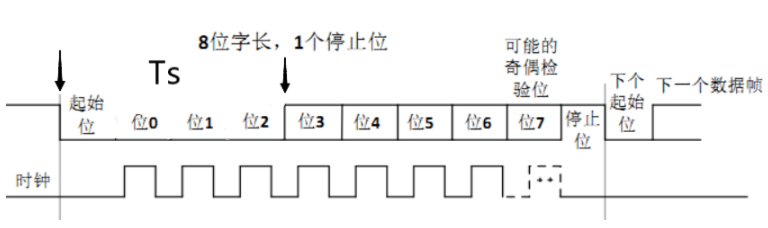
UART硬件波特率自适应检测首个通信字节的位宽(1bit、2bit、4bit、8bit),检测前一个边沿和后一个边沿之间的位长,即检测前一个边沿为下降沿,后一个边沿为上升沿或前一个边沿为下降沿,后一个边沿为下降沿,可通过软件灵活配置。
本实例以串口工具作为上位机,MM32F013x的UART1作为下位机,MCU端初始化为非标准波特率9200,使能空闲中断及其他状态标志位,上位机切换不同的波特率,由于上位机和MCU端的波特率不同,可能出现通信失败的情况,启动UART硬件波特率自适应功能,即检测上位机发的首个字节位宽来识别上位机的波特率,MCU端通过硬件波特率自适应切换到对应的波特率,与上位机维持后续正常的通信。
如下图所示,以首字节0XF8为例,首字节位宽为4bit的原理说明:
2、程序配置
2.1 初始化MM32F013x UART1串口
从官网下载MM32F013x例程,这里我们在MM32F0133C7P的样例程序中添加注释并对代码修改。
#include "bsp_UART.h"
#include "led.h"
/*******************************************************************************
* 函数名称:void bsp_UART1_Init(u32 baudrate)
* 函数功能:初始化UART1 PA9/PA10分别作为UART1的TX/RX
* 输入参数:无
* 返回数值:无
******************************************************************************/
void bsp_UART1_Init(u32 baudrate)
{
//GPIO初始化结构体
GPIO_InitTypeDef GPIO_InitStructure;
//UART初始化结构体
UART_InitTypeDef UART_InitStructure;
//NVIC初始化结构体
NVIC_InitTypeDef NVIC_InitStructure;
//使能UART1时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_UART1, ENABLE);
//使能GPIOA时钟
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
//开启GPIOA PA9复用于UART1_TX功能
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_1);
//开启GPIOA PA10复用于UART1_RX功能
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_1);
//UART1_TX GPIOA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
//配置GPIOA.9 速度为高速50MHz
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
//配置GPIOA.9为复用推挽输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
//根据GPIO结构体初始化UART1_TX GPIOA.9
GPIO_Init(GPIOA, &GPIO_InitStructure);
//UART1_RX GPIOA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
//配置UART1_RX GPIOA.10为上拉输入
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
//根据GPIO结构体初始化UART1_RX GPIOA.10
GPIO_Init(GPIOA, &GPIO_InitStructure);
//串口波特率
UART_InitStructure.UART_BaudRate = baudrate;
//字长为8位数据格式
UART_InitStructure.UART_WordLength = UART_WordLength_8b;
//一位停止位
UART_InitStructure.UART_StopBits = UART_StopBits_1;
//无奇偶校验位
UART_InitStructure.UART_Parity = UART_Parity_No;
//无硬件数据流控
UART_InitStructure.UART_HardwareFlowControl = UART_HardwareFlowControl_None;
//允许收发模式
UART_InitStructure.UART_Mode = UART_Mode_Rx | UART_Mode_Tx;
//根据UART结构体初始化串口UART1
UART_Init(UART1, &UART_InitStructure);
//硬件自动波特率检测第1个字节位的位宽前一个边沿为下降沿,后一个边沿为上升沿
//___ _______
// |_ _ _ _|1 x x x x| = Binary:xxxx 1000 Fall to Rise -> 1 start bit
//AutoBaudRate Mode Fall to Rise 4bit width,the first byte is 0xF8 use test
UART_AutoBaudRateSet(UART1, ABRMODE_FALLING_TO_RISINGEDGE4BIT, ENABLE);
//接收数据中断、接收帧错误中断、自动波特率结束中断、自动波特率错误中断、空闲中断
UART_ITConfig(UART1, UART_IT_RXIEN | UART_ICR_RXFERRCLR | UART_ICR_ABRENDCLR |\ UART_ICR_ABRERRCLR | UART_ICR_RXIDLE | UART_IT_ERR, ENABLE);
//使能UART1
UART_Cmd(UART1, ENABLE);
//UART1 NVIC中断优先级设置
NVIC_InitStructure.NVIC_IRQChannel = UART1_IRQn;
//UART通道优先级0
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
//IRQ通道使能
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
//根据指定的参数初始化NVIC寄存器
NVIC_Init(&NVIC_InitStructure);
}
2.2 编写MM32F013x UART1串口中断服务函数
继续在bsp_UART.c文件中编写MM32F013x UART1串口中断服务函数如下所示。
/*******************************************************************************
* 函数名称:void UART1_IRQHandler(void)
* 函数功能:串口1 UART1中断服务程序
* 输入参数:无
* 返回数值:无
*******************************************************************************/
//自动波特率帧错误标志
u8 Auto_BaudRate_FraErr_Flag = 0;
void UART1_IRQHandler(void)
{
u8 Res;
//UART1接收中断
if(UART_GetITStatus(UART1, UART_IT_RXIEN) != RESET)
{
//清UART1接收中断标志
UART_ClearITPendingBit(UART1,UART_IT_RXIEN);
//读取UART1接收到的数据
Res = UART_ReceiveData(UART1);
//UART1接收数据缓存起来,最大接收UART1_REC_LEN个字节
UART1_Rx_Buf[UART1_Rx_Cnt] = Res;
//UART1作接收缓存溢出判断,最大接收UART1_REC_LEN个字节
if(UART1_Rx_Cnt < UART1_REC_LEN-1)
{
//还有数据要接收,接收计数变量自加
UART1_Rx_Cnt++;
}
else
{
UART1_Rx_Cnt = 0;
}
}
//帧错误中断标志位
if(UART_GetITStatus(UART1, UART_IER_RXFERR) != RESET)
{
//自动波特率帧错误标志置1
Auto_BaudRate_FraErr_Flag = 1;
//清帧错误中断标志位
UART_ClearITPendingBit(UART1,UART_IER_RXFERR);
}
//接收数据帧错误中断
if(UART_GetITStatus(UART1, UART_ICR_RXFERRCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_RXFERRCLR);
}
//空闲中断硬件波特率自校准
if(UART_GetITStatus(UART1, UART_ICR_RXIDLE) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_RXIDLE);
//自动波特率帧错误标志
if(Auto_BaudRate_FraErr_Flag == 1)
{
Auto_BaudRate_FraErr_Flag = 0;
//----------------Check MM32F013x UART_AutoBaudRateHard----------
//___ _______
// |_ _ _ _|1 x x x x| = Binary:xxxx 1000 Fall to Rise -> 1 start bit
//AutoBaudRate Mode Fall to Rise 4bit width,the first byte is 0xF8 use test
UART_AutoBaudRateSet(UART1, ABRMODE_FALLING_TO_RISINGEDGE4BIT, ENABLE);
}
}
//自动波特率错误中断清除位
if(UART_GetITStatus(UART1, UART_ICR_ABRERRCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_ABRERRCLR);
}
//自动波特率结束中断清除位
if(UART_GetITStatus(UART1, UART_ICR_ABRENDCLR) != RESET)
{
UART_ClearITPendingBit(UART1,UART_ICR_ABRENDCLR);
}
}
2.3 MM32F013x UART1串口接收函数
在bsp_UART.h文件中宏定义UART1波特率、接收字节长度,变量声明以及UART1接收数据函数和发送数据函数声明。
void UART1_Recv_Task(void)
{
//收到的数据原样返回到串口上位机
UART_SendBytes(UART1,UART1_Rx_Buf, UART1_Rx_Cnt);
}
2.4 MM32F013x UART串口发送函数
在bsp_UART.c文件中编写MM32F013x UART1发送数据函数,发送单字节数据和发送多字节数据函数分别如下所示:
/*******************************************************************************
* 函数名称:void UART_SendByte(UART_TypeDef* UARTx,u8 dat)
* 函数功能:UART发送单字节数据
* 输入参数:UARTx:UART1/UART2;dat:待发送的数据
* 返回数值:无
*******************************************************************************/
void UART_SendByte(UART_TypeDef* UARTx,u8 dat)
{
UART_SendData(UARTx, dat);
while(!UART_GetFlagStatus(UARTx, UART_FLAG_TXEPT));
}
/*******************************************************************************
* 函数名称:void UART_SendBytes(UART_TypeDef* UARTx,u8* buf, u16 len)
* 函数功能:UART发送多字节数据
* 输入参数:UARTx:UART1/UART2;buf:待发送的数据;len:待发送数据的长度
* 返回数值:无
*******************************************************************************/
void UART_SendBytes(UART_TypeDef* UARTx,u8* buf, u16 len)
{
while(len--)
{
UART_SendByte(UARTx,*buf++);
}
}
3、MM32F013x UART硬件 自适应波特率的功能演示
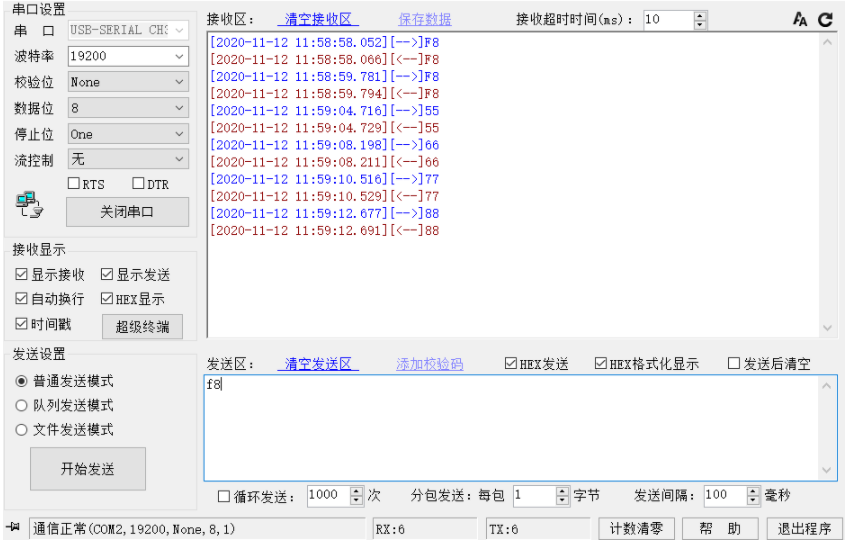
在main.c文件的main函数里初始化bsp_UART1_Init(9200)串口初始化函数,在while(1)大循环里调用测试UART1硬件自动波特率收发数据函数:UART1_Recv_Task();这里以检测UART1通信首字节为4bit宽为例,模式为前一个边沿为下降沿,后一个边沿为上升沿。
MCU端设置非标准波特率9200,我们通过上位机以不同的波特率发送F8进行硬件波特率自适应,自适应完成后UART1就切换到对应的波特率,MCU端收到数据后直接返回给上位机。
编辑:hfy
-
AN4908_USART自适应波特率2022-11-21 723
-
在MM32F013x上实现UART极性取反的功能应用2022-02-21 4480
-
MM32F013x——ADC任意通道工作模式2022-02-08 1120
-
MM32F013x——UART 多处理器通信2022-01-25 805
-
灵动微课堂 (第160讲) | MM32F013x——基于Embedded Studio搭建MM32开发环境2021-03-19 2545
-
MM32F013x——UART 单线半双工通信2021-03-10 5727
-
MM32F013x——UART 极性取反通信2021-01-29 1628
-
MM32F013x上实现UART单线半双工的功能应用2021-01-22 1841
-
灵动微课堂 (第145讲) | MM32F013x——UART 9bit 通信2020-11-27 2110
-
灵动微课堂 (第143讲) | MM32F013x——UART硬件波特率自适应2020-11-16 3430
全部0条评论

快来发表一下你的评论吧 !
