

浅谈有位置传感器和无位置传感器的电机驱动区别
描述
在我们的周围使用着许多电机。比如空调、洗衣机和吸尘器等家用电器,配备了冷却风扇、硬盘和DVD的电脑,以及在汽车、电车、建筑物和工厂等我们注意不到的很多地方,大量电机在积极发挥着它们的作用。
其中很多应用是由电机的转速和转矩控制的,电机的启动和驱动方法可以大致分为“①有位置传感器的驱动”和“②无位置传感器的驱动”两种。
①电机有位置传感器的驱动:需要使用传感器来检测电机转速和旋转位置的电机驱动方法
②电机无位置传感器驱动:不需要上述传感器的电机驱动方式
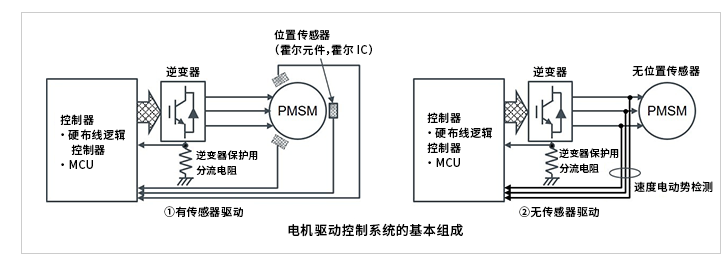
①中电机有传感器进行驱动的优点:能够准确地检测到电机启动和驱动时的位置和旋转,并且通过内置硬布线逻辑控制器的电机驱动器可以实现从低速到高速平稳地电机驱动和旋转控制。缺点:必须在电机中安装霍尔元件/霍尔IC等传感器,因此需要考虑传感器的安装位置精度以及连接传感器和电机控制器的布线。
②中电机无传感器驱动的优点:可用来驱动物理上无法配置传感器的电机和暴露于高温、水、油等不利环境下的电机。
缺点:因为利用速度电动势而在低速时表现不佳,并且旋转位置是通过MCU的计算而估算得来的,所以整体上的响应性能较差。另外,使用电机电流、电压和电机参数(电机绕组的R、L)取代位置和旋转检测传感器进行的估算,会受到电机个体差异的影响。
对于无传感器驱动,还有一种方法是通过MCU之外的硬布线逻辑专用控制器,利用外部强制换向信号启动,然后将速度电动势用作位置信号。
综上所述,每种方法都有其优点和缺点。因此,需要根据使用电机的环境、对可靠性的需求程度以及电机负载的类型(恒定转矩,恒定输出,平方转矩)等,选择一种适合于所需特性的电机驱动方法。
霍尔元件/霍尔IC:
使用霍尔效应根据磁通密度输出电压的磁传感器。霍尔效应是一种当电流流过固体并且垂直于固体表面施加于磁场时,会在电流方向和磁场方向分别产生垂直方向(正交)的电压的现象。
霍尔IC(也称为“霍尔传感器”)由运算放大器和数字转换器等组合而成。
速度电动势:
与磁通量的时间差–速度电动势相对应的电压。无传感器控制中的位置和速度估算方法中使用的元素之一。
外部强制换向:
由于在电机停止状态下不会产生感应电压,因此为了检测电机位置而在电机启动时从外部强制使电机旋转使之产生感应电压的做法称为“强制换向”。
编辑:hfy
-
使用位置传感器进行无刷电机控制2025-08-07 6360
-
位置传感器有哪些应用2016-10-09 2736
-
无位置传感器如何切闭环2018-08-16 3322
-
位置传感器与直流无刷电机有什么关系2019-06-28 2469
-
无位置传感器的电机控制方式2021-06-29 1651
-
无位置传感器的电机控制资料分享2021-07-05 2479
-
无位置传感器无刷直流电机数控调速器设计2016-12-20 1131
-
舰船电机无位置传感器控制2018-01-19 990
-
面装式永磁同步电机驱动系统无位置传感器控制2018-03-14 1165
-
对无位置传感器电机的驱动步骤及方法2018-08-13 116
-
如何实现无传感器初始位置检测2019-01-09 10447
-
为什么说BLDC无刷电机采用无位置传感器更具优势?2019-07-30 7366
-
位置传感器原理及应用2019-09-30 25391
-
位置跟踪器与位置传感器的区别是什么2020-05-04 6463
-
无刷电机位置传感器的作用及其布局方面的注意事项2023-02-15 4667
全部0条评论

快来发表一下你的评论吧 !
