

探讨多雷达之间互相干扰的有效解决方案
描述
随着高级驾驶辅助系统(Advanced Driver Assistance Systems, ADAS)在近些年的飞速发展,毫米波雷达在新车的装配率日益增加。试想未来行驶在大街小巷的车辆都配备了毫米波雷达之后,雷达间的互相干扰将会成为一个越来越不容忽视的问题。
针对多雷达之间互相干扰的问题,加特兰的Alps雷达SoC给用户提供了有效的解决方案。在进一步展开前,让我们看一下常见的雷达间的信号干扰是怎样的:图1是一个典型的FMCW雷达信号被干扰的示例。假如雷达在工作时接收到周围其他雷达发出的chirp信号,且该干扰信号频率和当前雷达的工作频率相近,则干扰源将进入到雷达有效中频带宽(IF bandwidth)内。图2显示了干扰信号进入雷达有效中频带宽后情形,可见此时干扰信号对有效信号波形产生了很大的影响,容易导致有用目标信号无法被检出,或者产生虚假目标点。

图1
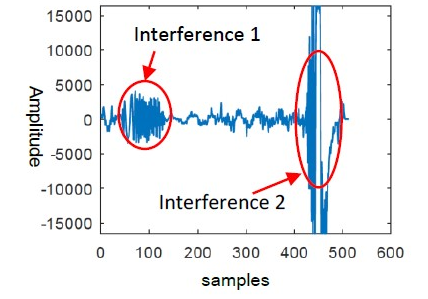
图2
为了解决上述的干扰问题,Alps芯片中的baseband加速器集成了多种抗干扰功能,包括frequency hopping模式、chirp shifting模式、phase scrambling模式以及interference mitigation功能。
01 Frequency hopping模式
该模式通过随机数生成器—异或链来随机改变frame中不同chirp的起始发射频率。
frequency hopping模式下的信号如下图3所示:
当异或链状态为0时,不改变chirp的起始频率,当异或链状态为1时改变chirp的起始频率;
当环境中存在同样扫频带宽的干扰信号时,通过这样的随机改变chirp的起始频率,其与干扰信号混频产生的中频信号将会在Alps的模拟带宽之外。
该中频信号将被滤波器过滤,故整个frame接收到的干扰信号能量将降低约一半(假设改变频率的chirp数量和不改变频率的chirp数量相同)。
而对于进入带内的干扰信号,由于其在chirp间出现的频率为随机数,其能量将会被分摊到整个2D-FFT的频谱内,因此不会聚集而产生假目标干扰。
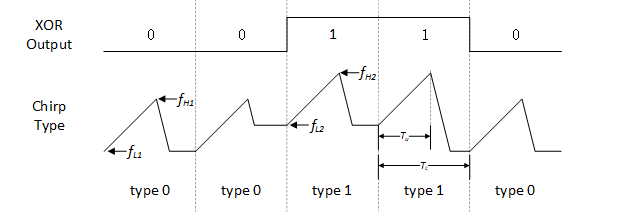
图3
02 Chirp shifting模式
与frequency hopping模式类似,该模式通过随机数生成器—异或链来随机改变frame中不同chirp的起始时间点。
当异或链状态是1时,改变chirp的起始时间点,当状态是0 时,不改变chirp的起始时间点。
当环境中存在与雷达频率相近的干扰源时,通过随机改变chirp的起始时间点,其与干扰信号混频产生的中频信号也将会在Alps的模拟带宽之外,从而达到和frequency hopping模式类似的效果。
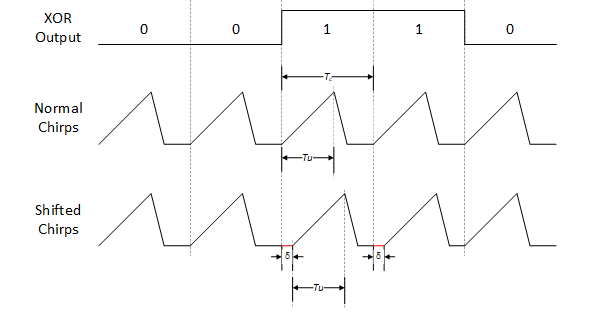
图4
03 Phase scrambling模式
该模式下,Alps通过随机数生成器随机改变frame中不同chirp的起始相位,如图5所示。当干扰信号出现时,由于相位被随机进行调制,其能量将会被分摊到整个2D-FFT的频谱内,因此不会聚集而产生假目标干扰。

图5
在以上三种模式下,Alps都需要对不同状态的chirp做相位补偿,从而减小chirp调制产生的相位误差。若补偿不当,则容易引起2D-FFT频谱中出现沿速度维的假目标。Alps独有的Baseband加速器将会自动对前两种抗干扰模式做补偿,而对于phase scrambling模式,用户可以在雷达标定环节对180度相位做更精准的补偿,从而获得三种模式中最优的效果,即不产生速度维spur(目前Alps SDK中已经集成了标定指令,非常易于用户在标定环节中调用)。
04 Interference mitigation模式
除了前面的三种抗干扰方式以外,Alps的baseband加速器还集成了一种干扰移除的算法。当雷达收集到时域信号波形后,会对信号的幅值变化率进行判断。如图6所示,若发现了信号中存在幅值变化率异常的采样点,则会将这些信号识别为干扰。在该情况下,Alps将会对这些信号做移除处理,从而降低2D-FFT的噪底。
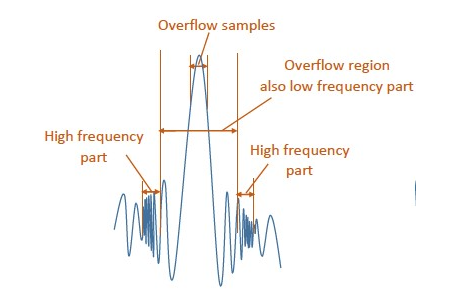
图6
综上所述,对于多雷达的互相干扰问题,Alps提供了多种手段来供用户选择和使用,并对干扰的抑制、干扰的去除都产生了积极的作用。
编辑:hfy
- 相关推荐
- 热点推荐
- 毫米波雷达
-
两个测量通道信号之间互相干扰,如何解决?2018-01-10 26421
-
315m遥控开关互相干扰2011-05-31 7263
-
GPS与GPRS两组模块会互相干扰吗?2016-03-04 7199
-
示波器不隔离,通道之间信号会互相干扰么?2016-07-20 2609
-
无人机超声波互相干扰问题2018-05-10 5627
-
请问cc2530 zigbee量产,编译固件,怎么防止多套网络之间互相干扰啊?2018-06-01 3697
-
labview程序互相干扰2018-12-21 2103
-
基于CAN现场总线的同步控制解决方案2021-01-29 2231
-
汽车雷达传感器的解决方案2022-11-07 1102
-
stm32f103怎么做四路的ad采集还不会互相干扰?2023-09-26 587
-
基于多终端联合传输的干扰消除方案2018-02-24 1089
-
相干雷达与伪相干雷达解析2022-04-29 6707
-
华为新汽车专利获授权,电动汽车磁场信号互相干扰问题得到解决2022-05-25 2236
-
2.4g无线模块和蓝牙模块会互相干扰吗?2021-10-22 11940
-
两个对讲机中继台的天线架在一起会互相干扰吗?2024-02-01 3447
全部0条评论

快来发表一下你的评论吧 !
