

重点讲解如何结合RTOS进行处理数据
电子说
描述
我们巧妙的利用了RTSO自带的消息队列,我们可以把每一个接收的数据看做一个消息元素。
先回顾一下知识点:
基于 FreeRTOS 的应用程序由一组独立的任务构成——每个任务都是具有独立权限的程序。这些独立的任务之间的通讯与同步一般都是基于操作系统提供的IPC通讯机制,而FreeRTOS 中所有的通信与同步机制都是基于队列实现的。
消息队列是一种常用于任务间通信的数据结构,队列可以在任务与任务间、中断和任务间传送信息,实现了任务接收来自其他任务或中断的不固定长度的消息。任务能够从队列里面读取消息,当队列中的消息是空时,挂起读取任务,用户还可以指定挂起的任务时间;当队列中有新消息时,挂起的读取任务被唤醒并处理新消息,消息队列是一种异步的通信方式。
1.数据存储
队列可以保存有限个具有确定长度的数据单元。队列可以保存的最大单元数目被称为队列的“深度”。在队列创建时需要设定其深度和每个单元的大小。
通常情况下,队列被作为 FIFO(先进先出)缓冲区使用,即数据由队列尾写入,从队列首读出。当然,由队列首写入也是可能的。
往队列写入数据是通过字节拷贝把数据复制存储到队列中;从队列读出数据使得把队列中的数据拷贝删除。
2.读阻塞
当某个任务试图读一个队列时,其可以指定一个阻塞超时时间。在这段时间中,如果队列为空,该任务将保持阻塞状态以等待队列数据有效。当其它任务或中断服务例程往其等待的队列中写入了数据,该任务将自动由阻塞态转移为就绪态。当等待的时间超过了指定的阻塞时间,即使队列中尚无有效数据,任务也会自动从阻塞态转移为就绪态。
由于队列可以被多个任务读取,所以对单个队列而言,也可能有多个任务处于阻塞状态以等待队列数据有效。这种情况下,一旦队列数据有效,只会有一个任务会被解除阻塞,这个任务就是所有等待任务中优先级最高的任务。而如果所有等待任务的优先级相同,那么被解除阻塞的任务将是等待最久的任务。
说些题外话,ucos中是具有广播消息的,当有多个任务阻塞在队列上,当发送消息的时候可以选择广播消息,那么这些阻塞的任务都能被解除阻塞。
3.写阻塞
与读阻塞想反,任务也可以在写队列时指定一个阻塞超时时间。这个时间是当被写队列已满时,任务进入阻塞态以等待队列空间有效的最长时间。
由于队列可以被多个任务写入,所以对单个队列而言,也可能有多个任务处于阻塞状态以等待队列空间有效。这种情况下,一旦队列空间有效,只会有一个任务会被解除阻塞,这个任务就是所有等待任务中优先级最高的任务。而如果所有等待任务的优先级相同,那么被解除阻塞的任务将是等待最久的任务。
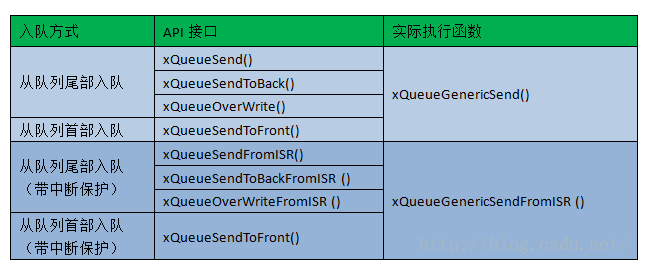
消息队列的工作流程1.发送消息
任务或者中断服务程序都可以给消息队列发送消息,当发送消息时,如果队列未满或者允许覆盖入队, FreeRTOS 会将消息拷贝到消息队列队尾,否则,会根据用户指定的阻塞超时时间进行阻塞,在这段时间中,如果队列一直不允许入队,该任务将保持阻塞状态以等待队列允许入队。当其它任务从其等待的队列中读取入了数据(队列未满),该任务将自动由阻塞态转为就绪态。当任务等待的时间超过了指定的阻塞时间,即使队列中还不允许入队,任务也会自动从阻塞态转移为就绪态,此时发送消息的任务或者中断程序会收到一个错误码 errQUEUE_FULL。
发送紧急消息的过程与发送消息几乎一样,唯一的不同是,当发送紧急消息时,发送的位置是消息队列队头而非队尾,这样,接收者就能够优先接收到紧急消息,从而及时进行消息处理。
下面是消息队列的发送API接口,函数中有FromISR则表明在中断中使用的。
消息队列读取
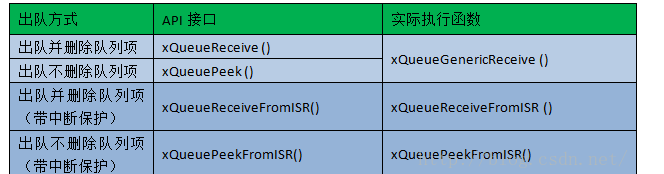
任务调用接收函数收取队列消息, 函数首先判断当前队列是否有未读消息, 如果没有, 则会判断参数 xTicksToWait, 决定直接返回函数还是阻塞等待。
如果队列中有消息未读, 首先会把待读的消息复制到传进来的指针所指内, 然后判断函数参数 xJustPeeking == pdFALSE的时候, 符合的话, 说明这个函数读取了数据, 需要把被读取的数据做出队处理, 如果不是, 则只是查看一下(peek),只是返回数据,但是不会把数据清除。
对于正常读取数据的操作, 清除数据后队列会空出空位, 所以查看队列中的等待列表中是否有任务等发送数据而被挂起, 有的话恢复一个任务就绪, 并根据优先级判断是否需要出进行任务切换。
对于只是查看数据的, 由于没有清除数据, 所以没有空间新空出,不需要检查发送等待链表, 但是会检查接收等待链表, 如果有任务挂起会切换其到就绪并判断是否需要切换。
接下来,我们可以从中断再到任务这样一个流程去编写代码:
如下的框图来说明一下 FreeRTOS 消息队列的实现,让大家有一个形象的认识。

1. 中断如何处理:
///
void LpUart0_IRQHandler(void)
{
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
uint8_t res=0;
// if(LPUart_GetStatus(M0P_LPUART0, LPUartPE)) /*奇偶检验错误*/
// {
// LPUart_ClrStatus(M0P_LPUART0, LPUartPE);
// }
if(LPUart_GetStatus(M0P_LPUART0, LPUartRC)) ///接收数据中断
{
LPUart_ClrStatus(M0P_LPUART0, LPUartRC); ///<清接收中断请求
res = LPUart_ReceiveData(M0P_LPUART0);
xQueueSendFromISR(usart_Queue,(void *) &res,&xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
任务中接收信号,这里并不是每一条消息都接收吗,因为没有空闲中断,而是做了100ms绝对延时,确保一帧数据接收完成。
/**
***********************************************************************
** \brief 2400波特率:'100ms = 24bytes'
**
**
** \param 1 :void
** \retval void
***********************************************************************/
void APP_LocalCOM_ReadData(void)
{
uint8_t temp_bytes = 0; /*队列中字节长度new*/
uint8_t cnt;
static uint8_t buff[QueueSIZE] = {0}; /*暂存接收协议,从0x68开始,用于crc计算*/
static TickType_t StartTick = 0;
static uint8_t ShadowBytes = 0; /*old*/
temp_bytes = uxQueueMessagesWaiting(usart_Queue);//检查消息数
if(temp_bytes == 0)//检查队列的长度
{
ShadowBytes = 0;
}
else
{
if(ShadowBytes != temp_bytes)//有新的数据
{
ShadowBytes = temp_bytes;
StartTick = xTaskGetTickCount();
}
else
{
if(xTaskGetTickCount() - StartTick > 100)
{
for(cnt = 0; cnt
{
xQueueReceive(usart_Queue,(void*)&buff[cnt%QueueSIZE],(TickType_t)100);//接收数据
}
protocol_parse(buff,temp_bytes);
//BSP_UARTx_SendBytes(M0P_UART0,temp_bytes, buff); //test
}
}
}
}
编辑:hfy
-
开发中用到的RTOS和TSOS有什么区别2018-08-29 2628
-
如何学习RTOS2018-11-22 5898
-
INtime RTOS内部的关键处理机制是什么2021-09-29 1290
-
对RTOS进行讲解2021-11-10 756
-
讲解电源系统中纹波和噪声的处理2021-11-11 1383
-
RTOS中的中断是怎么处理的?2023-09-22 588
-
用实现OSEK/VDX的RTOS进行汽车电控单元开发2009-04-20 969
-
RTOS数据采集系统中实时处理与高速性的设计考虑2009-08-06 644
-
处理器SDK及RTOS操作系统的作用介绍2018-08-10 6166
-
实时Linux和RTOS的基本特性及技术进行比较2019-05-14 7397
-
RTOS低功耗设计原理的讲解和实现概述2020-04-15 1439
-
基于FreeRTOS应用程序的数据处理2021-01-28 3277
-
基于RTOS的嵌入式系统软件的设计讲解2021-07-30 1023
-
如何处理RTOS错误和超时2022-06-29 4270
-
RTOS的特性和类型2024-08-20 2876
全部0条评论

快来发表一下你的评论吧 !
