

如何通过SPI方式读取BMI088传感器数据
电子说
描述
BMI088传感器是一款六轴传感器模块,内部带有一个16位的加速度传感器模块和一个16位的陀螺仪模块。该传感器支持SPI和I2C接口。在本篇文章中,我们将使用NUCLEO-G070RB开发板通过SPI方式读取BMI088传感器的数据,并通过串口打印输出。
所需的组件
● NUCLEO-G070RB开发板
● YBX-BMI088(SPI)加速度传感器模块(淘宝链接)
● 连接跳线
● Micro USB线缆
连接方式
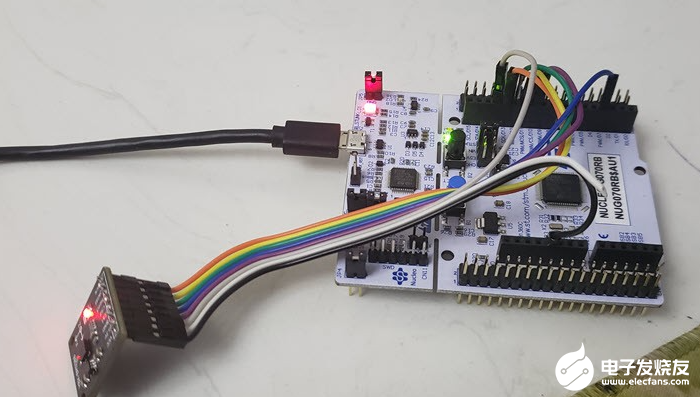
以下是NUCLEO-G070RB开发板与BMI088模块的连接方式:
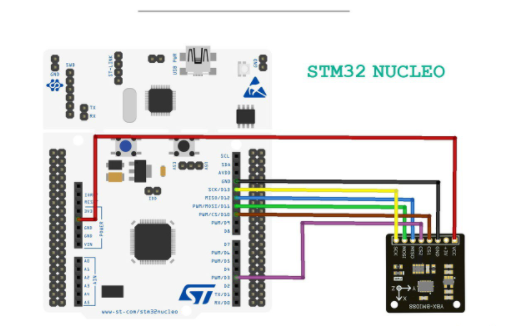
BMI088模块连接到NUCLEO-G070RB的SPI1接口,对应的引脚分别是PA5(SCK)、PA6(MISO)和PA7(MOSI),加速度计的片选引脚CS1连接到PB0,陀螺仪的片选引脚CS2连接到PB3。BMI088模块的VCC连接到+5V引脚,GND引脚连接到NUCLEO-G070RB的任意GND引脚。
代码
首先我们使用STM32CubeMX工具生成工程文件,根据硬件连接方式选择引脚的功能,然后启用SPI1通讯。SPI1选择全双工主机模式(Full-Duplex Master),硬件NSS信号选择Disable。在参数设置中,数据位大小选择8位,MSB优先。选择合适的分频系数。在无法进行通讯的情况下,可以适当降低SPI1外设的频率。
生成KEIL工程后,接下来我们需要将BOSCH官方提供的BMI088驱动集成到工程里面。
首先,将 bmi085.c、bmi085.h、bmi088.c、bmi088.h、bmi08a.c、bmi08g.c、bmi08x_defs.h以及bmi08x.h文件复制到工程所在的目录,然后添加到工程中。在bmi08x_defs.h使能以下宏定义来启用BMI088功能。
#ifndef BMI08X_ENABLE_BMI088
#define BMI08X_ENABLE_BMI088 1
#endif
在main.c文件中包含以下头文件:
#include “bmi08x.h”
#include “bmi088.h”
然后定义一个bmi08x结构体,该结构体定义了使用的是I2C还是SPI接口,以及读写操作所需的函数指针。
struct bmi08x_dev dev = {
.accel_id = CSB1_Pin,
.gyro_id = CSB2_Pin,
.intf = BMI08X_SPI_INTF,
.read = &stm32_spi_read,//user_spi_read,
.write = &stm32_spi_write,//user_spi_write,
.delay_ms = &HAL_Delay//user_delay_milli_sec
};
接下来,初始化BMI088传感器,设置加速计和陀螺仪的量程、带宽和工作模式等。然后使用以下函数读取BMI088的传感器数据:
/* Read the sensor data into the sensor data instance */
rslt = bmi08a_get_data(&user_accel_bmi088, &dev);
/* Read the sensor data into the sensor data instance */
rslt = bmi08g_get_data(&user_gyro_bmi088, &dev);
将传感器数据打印输出至串口:
printf(“x:%d”,user_accel_bmi088.x);
printf(“\t”);
printf(“y:%d”,user_accel_bmi088.y);
printf(“\t”);
printf(“z:%d”,user_accel_bmi088.z);
printf(“\t”);
printf(“x:%d”,user_gyro_bmi088.x);
printf(“\t”);
printf(“y:%d”,user_gyro_bmi088.y);
printf(“\t”);
printf(“z:%d”,user_gyro_bmi088.z);
printf(“\t”);
rslt = bmi08a_get_sensor_temperature(&dev,&bmi08x_sensor_temp);
if (rslt == BMI08X_OK)
{
printf(“Temp:%.3f”, bmi08x_sensor_temp/1000.0);
}
else
{
printf(“BMI088 Get Sensor Temperature Error\n”);
}
printf(“\n”);
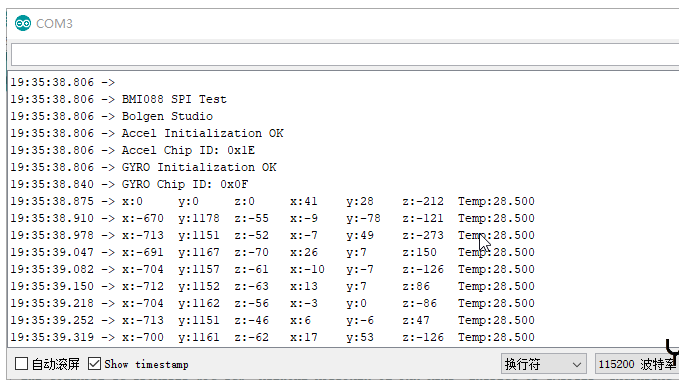
输出结果
将程序下载到NUCLEO-G070开发板中,运行程序,串口监视器将显示接收到的数据:
编辑:hfy
-
用430单片机的模拟spi读取一个传感器的11bit数据?2013-05-08 2072
-
用labview通过wifi读取485传感器数据(附通过com口方式读取数据VI已完成)2015-12-15 7138
-
通过SPI通信的cyw20719读取G传感器如何降低功耗?2018-09-13 2800
-
SPI读数异常是什么原因造成的?2018-09-27 7148
-
SPI受传感器芯片影响导致读数异常2018-10-17 2296
-
ST是否为博世BMI160的IMU传感器提供传感器融合库?2019-04-26 3706
-
BMI088惯性传感器无人机方案2019-08-01 2897
-
STM32H750通过SPI读取BMX160传感器数据2019-08-15 4651
-
BMI088高性能6轴惯性传感器2021-01-08 952
-
BMI160传感器的实际应用2021-04-23 1182
-
介绍传感器数据的读取2022-02-11 1176
-
LPC55S06-EVK如何使用HS-SPI读取压力传感器?2023-04-25 686
-
用STM32F429的SPI采集传感器数据时,利用中断读取数据不够是为什么?2023-09-25 536
-
BMP388气压MEMS传感器,为无人机高度稳定性全方位提供了解决方案2018-09-06 3705
-
贸泽备货Bosch BMI088高性能IMU 为无人机和机器人提供卓越的抗振性2019-01-01 1347
全部0条评论

快来发表一下你的评论吧 !
