

基于二维压电透射式微扫描器的红外超分辨率成像
今日头条
描述
在各类成像应用中,一般都需要高分辨率的图像。例如在国防、医疗、科研、军事等各领域中,高分辨率的图像更有助于监控、诊断、研究、侦查等。然而,在各种场合,图像分辨率往往不能满足应用的要求。
因此,为了在目前的探测器上实现高分辨率的成像,超分辨率技术得以出现和发展。超分辨率技术一般分三类,一种是主要考虑多帧亚像素级位移,对模糊因子考虑较少;另一种是对成像中模糊因子进行估计,例如通过多通道盲反卷积;还有一类是两者的相结合。超分辨率技术在红外成像领域应用非常广泛,一般通过微扫描技术,获取多帧亚像素位移图像,再通过各种超分辨率算法以得到高分辨率的图像。
因此,为了获取高分辨率的图像,多幅具有亚像素级位移图像的获取是其前提条件。而亚像素级位移图像的获取需要通过微扫描来实现。微扫描一般是指对探测器进行的亚像素的微位移调整,从而获取相应亚像素位移的图像序列。
在透射式微扫描器中,微位移的实现可通过芯明天N62.XY20二维压电扫描台来实现,它的内部分为X向运动压电陶瓷和Y向运动压电陶瓷。
下图中为芯明天二维压电扫描台应用于红外热成像仪。
N62.XY20透射式微扫描器可在X和Y方向上进行顺序微位移,使像点达到半个像素的移动,实现2×2微扫。
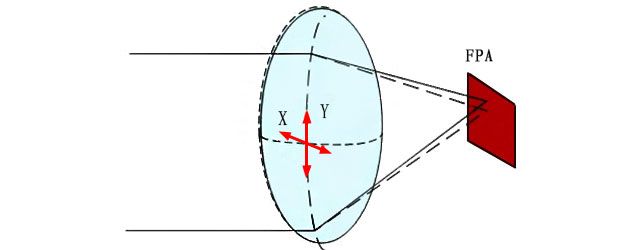
透射式微扫描器实现2×2微扫的原理1

透射式微扫描器实现2x2微扫的原理2
N62.XY20透射式微扫描器的控制原理如下图所示。X向控制信号(模拟或数字)经过微扫驱动电路施加至X向运动压电陶瓷,从而使得微扫器进行X向的微位移,同时,N62.XY20压电扫描台中配有闭环反馈传感器,会将X向运动位置反馈于微扫驱动电路,形成闭环回路控制。Y向同理。该控制过程保证了N62.XY20透射式微扫描器快速、精准的微位移调整,以利于探测器获取多帧亚像素图像。
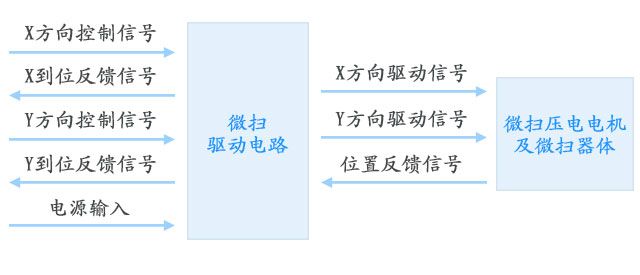
透射式微扫描器框图
N62.XY20透射式微扫描器驱动方式
下图中,上下左右四处方框代表的是N62.XY20透射式微扫描器两个方向相对应的压电陶瓷,可以看出,它的驱动方式为差分驱动方式,每一方向都需要一个驱动电压范围在0到150V和一个恒定电压+150V。微扫器体在零位置时,需每通道驱动电压在75V(出厂时根据位移所对应的电压确定)位置,当每通道驱动电压高于75V时,微扫器体位置向X1、Y2方向移动,当每通道驱动电压低于75V时,微扫器体位置向X2、Y1方向移动。通过外部0~5V或0~10V模拟信号输入(可自由选择),控制微扫器体整个台面进行满行程移动。
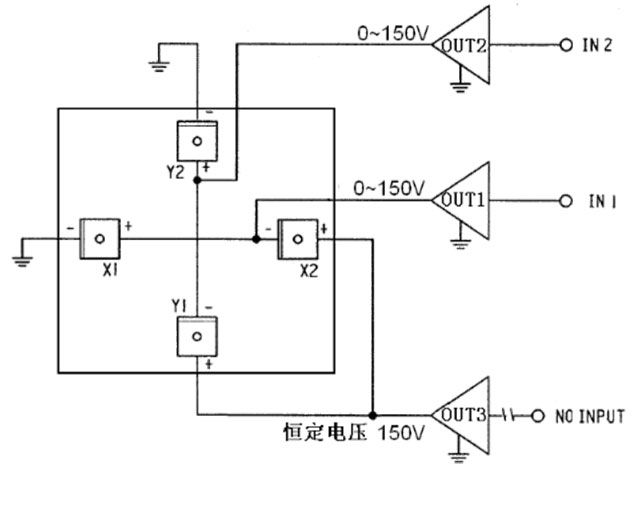
N62.XY20透射式微扫描器驱动原理图
fqj
-
[原创]Honeywell Xenon 1902gHD无线二维影像扫描器2010-06-02 4402
-
[原创]Honeywell Xenon 1900手持式二维影像扫描器2010-06-06 3527
-
扫描器识别二维码2016-02-23 3573
-
雷达成像近似二维模型及其超分辨算法2009-10-21 2292
-
超分辨率技术在红外微扫描中的应用2011-07-21 981
-
分享霍尼韦尔Voyager 1602g口袋型无线二维影像扫描器的性能分析2019-10-17 3845
-
二维码扫描器,多样化场景应用2022-08-12 2600
-
二维码扫描器是干嘛用的?嵌入式二维码扫描器作用有哪些?2023-03-07 2775
-
如何选购到性价比更高的二维码识别扫描器?2023-07-04 1966
-
工业二维码扫描器在电子业生产追溯管理中的应用2023-08-01 1575
-
二维固定式扫描器能扫描哪些条码2023-08-10 1889
-
二维码扫描器模块 嵌入式扫码模块价格2023-10-23 3837
-
哪种二维码扫描器适合生产线应用?2024-12-19 1281
-
工业二维码条码扫描器流水线条码扫描2025-01-07 1250
-
如何更好选择二维码识别扫描器厂家?2025-08-13 1262
全部0条评论

快来发表一下你的评论吧 !
