

FreeRTOS如何减少RAM占用空间并加快执行速度?
电子说
描述
之前分享了《FreeRTOS V10.4.0更新了哪些功能?》,今天就来详细讲述其中的一个知识点:FreeRTOS的直接任务(消息)通知,这样做的目的就是减少RAM占用空间并加快执行速度。
一、写在前面
几乎所有RTOS操作系统都提供了队列和信号量的功能,对于大部分新手来说,使用队列和信号量是必备技能。
但是,在大多数情况下,他们都是使用“中介对象”进行通信,而并非“直接任务消息”通信。
通过“中介对象”进行通信,每一组队列或信号量都会分配一段内存(消息缓冲区和流缓冲区)。就存在一个问题,如果队列或信号量比较多,势必造成更大的内存开支。
但是,如果通过本文说的“直接消息”通信,会节约很多内存。
二、什么是直接任务通知?
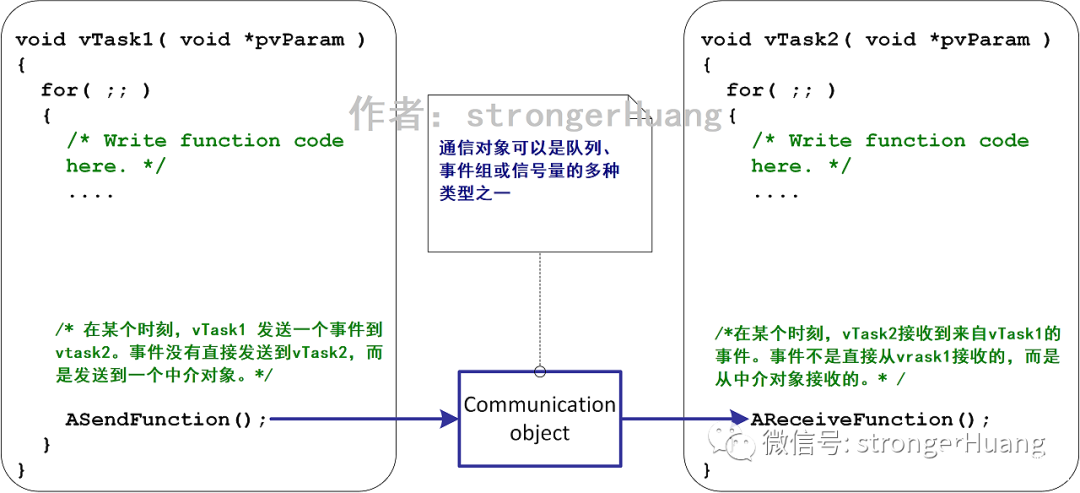
大多数任务间通信方法都通过中介对象,例如队列,信号量或事件组。发送任务写入通信对象,接收任务从通信对象读取。
比如FreeRTOS的队列通信,首先创建队列之前要定义一个队列:
QueueHandle_t xQueue;xQueue = xQueueCreate(10, sizeof( /* 长度 */ ) );
而这个队列包含了很多中介对象:
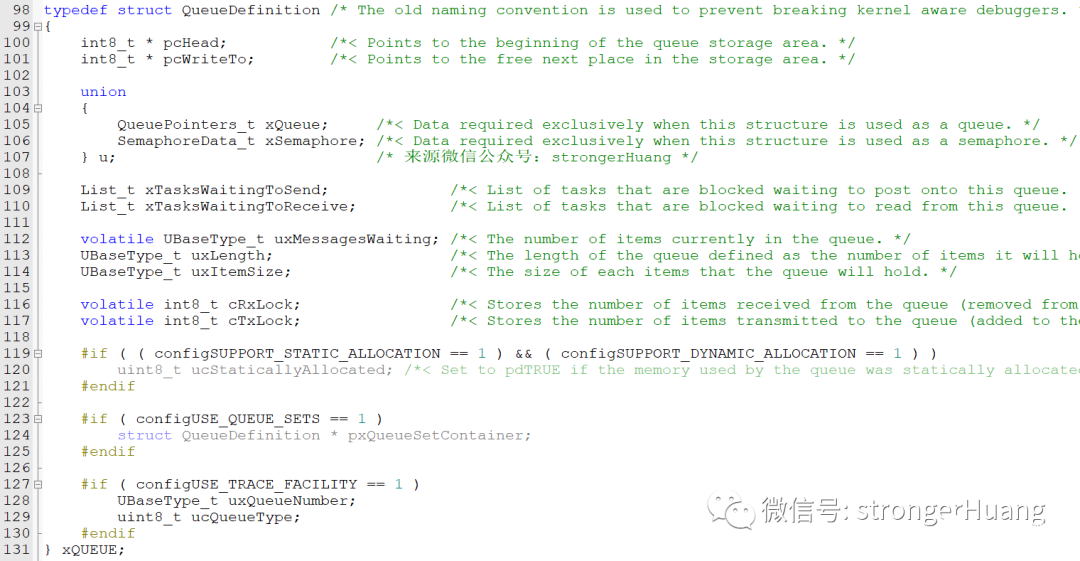
大家可以算一下这个“中介对象”会占用多少RAM空间?
通过一个代码示意图理解中介对象通信:
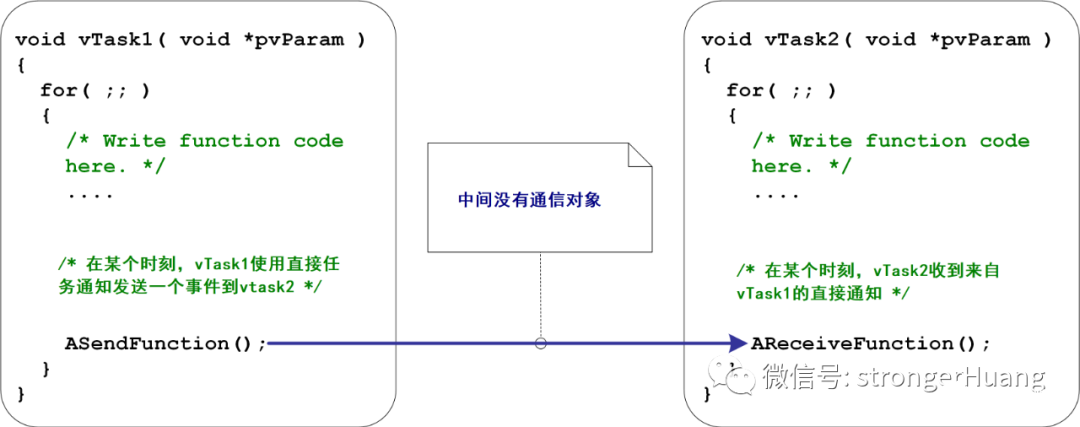
直接任务通知:
当使用直接任务通知时,顾名思义,发送任务将通知直接发送给接收任务,而无需中介对象。
通过一个代码示意图理解:
从FreeRTOS V10.4.0开始,每个任务都有一系列通知。每个通知都包含一个32位值和一个布尔状态,它们一起仅消耗5个字节的RAM。
就像任务可以阻止二进制信号量等待该信号量变为“可用”一样,任务可以阻止通知以等待该通知的状态变为“待处理”。同样,就像任务可以阻止计数信号量以等待该信号量的计数变为非零一样,任务可以阻止通知以等待该通知的值变为非零。下面的第一个示例演示了这种情况。
通知不仅可以传达事件,还可以通过多种方式传达数据。
三、进一步分析直接任务通知
通过对比FreeRTOS V10.4.0和之前版本,你会发现V10.4.0多了一些API,比如ulTaskNotifyTake / ulTaskNotifyTakeIndexed:
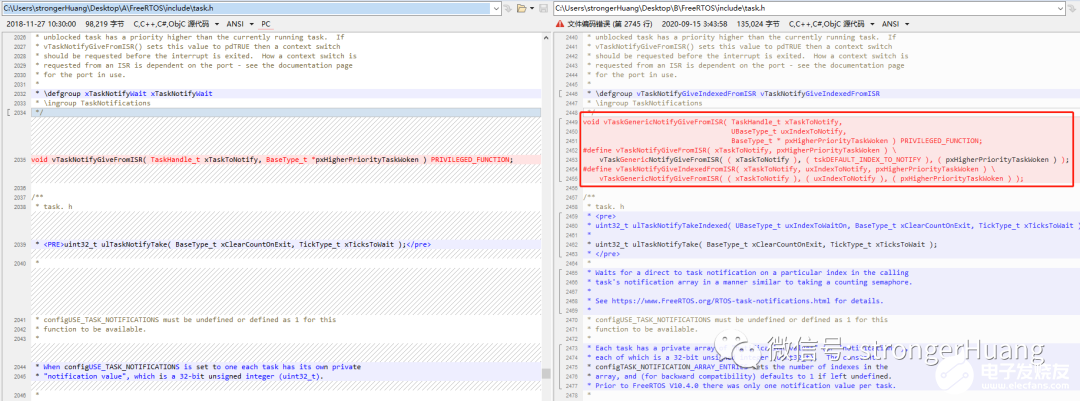
在官网也有针对这些API的详细介绍和说明,以及应用代码例子:
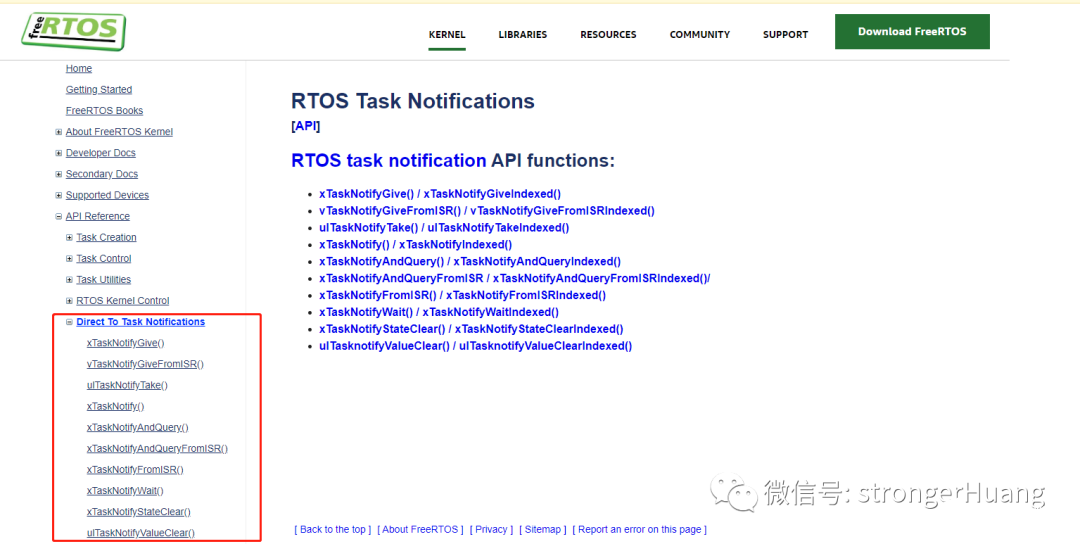
直接任务通信API说明地址:
https://www.freertos.org/RTOS-task-notification-API.html
(公号不支持外链接,请复制链接到浏览器打开)
四、使用直接任务通知性能优势和使用限制
任务通知的灵活性使它们可以在需要创建单独的队列、 二进制信号量、 数信号量或事件组的情况下使用。
与使用中介对象(例如信号量)来取消阻止任务相比,使用直接通知取消阻止RTOS任务的速度快了45% (来自官方数据) ,并且使用的RAM更少。
当然,有这些性能优势,也肯定一些限制:
仅当只有一个任务可以作为事件的接收者时,才可以使用RTOS任务通知。但是,在大多数实际使用情况下都可以满足此条件,例如中断使执行任务处理的任务中断时,该任务将处理该中断接收的数据。
仅在使用RTOS任务通知代替队列的情况下:接收任务可以在“阻塞”状态下等待通知(因此不占用任何CPU时间),而发送任务不能在“阻塞”状态下等待消息。如果发送无法立即完成,则发送完成。
五、使用方法
使用方法其实很简单,只要你会使用RTOS的队列、信号量,基本看一眼官方例子就能使用。
我这里也拿官方例子说明一下:
/* main() 创建的两个任务的原型 */static void prvTask1( void *pvParameters );static void prvTask2( void *pvParameters );/* 处理由main() 创建的任务的句柄 */static TaskHandle_t xTask1 = NULL, xTask2 = NULL;/* 创建两个任务,来回发送通知,然后启动RTOS调度程序 */void main( void ){ xTaskCreate( prvTask1, “Task1”, 200, NULL, tskIDLE_PRIORITY, &xTask1 ); xTaskCreate( prvTask2, “Task2”, 200, NULL, tskIDLE_PRIORITY, &xTask2 ); vTaskStartScheduler();}/*———————————————————–*//* prvTask1() 使用API的“索引”版本 */static void prvTask1( void *pvParameters ){ for( ;; ) { /* 发送通知到prvTask2() ,使其脱离“已阻止”状态。*/ xTaskNotifyGiveIndexed( xTask2, 0 ); /* 阻止等待prvTask2() 通知此任务 */ ulTaskNotifyTakeIndexed( 0, pdTRUE, portMAX_DELAY ); }}/*———————————————————–*//* prvTask2()使用API的原始版本(不带“索引”) */static void prvTask2( void *pvParameters ){ for( ;; ) { /* 等待prvTask1()通知此任务 */ ulTaskNotifyTake( pdTRUE, portMAX_DELAY ); /* 向prvTask1()发送通知,使它退出“已阻止”状态 */ xTaskNotifyGive( xTask1 ); }}
责任编辑:haq
-
提高matlab运行速度和节省空间经验小谈2012-02-29 3535
-
代码执行速度2012-07-12 2725
-
C6657 EVM Run without Debug,请问要如何加快执行速度2018-08-03 2419
-
请问dspc6748怎么加快程序运行速度?2019-10-11 1572
-
labview报表执行速度很慢2020-08-12 2852
-
如何显著减少PCB占用空间?2021-01-19 2071
-
FATFS是如何减少flash和ram的占用呢2022-02-11 1875
-
如何显著减少PCB占用空间2022-11-09 504
-
求助,平常MCU的指令执行速度为多少?2023-11-01 673
-
如何加快32的运行速度?2023-11-06 665
-
为什么存储空间还能影响iPhone运行速度?2019-07-16 13781
-
FreeRTOS的直接任务(消息)通知2021-01-07 5726
-
AN-1322:ADuCM320代码执行速度2021-03-21 665
-
stm32 FATFS文件系统如何减少Flash和RAM占用,FATFS移除中文文件名,FATFS移除动态内存2021-12-08 2043
-
程序结构的优化及执行速度2022-07-25 1487
全部0条评论

快来发表一下你的评论吧 !
