

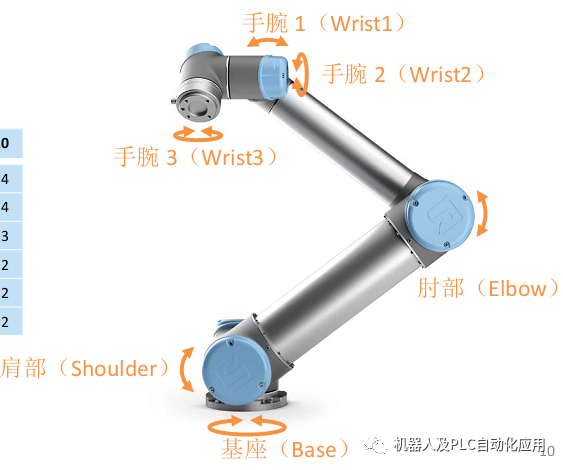
优傲机器人简单操作及PolyScope软件系统介绍
描述
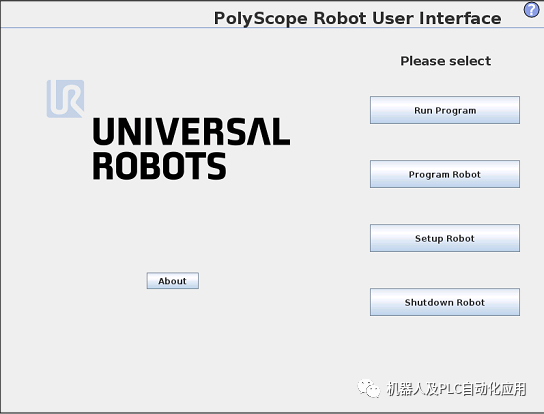
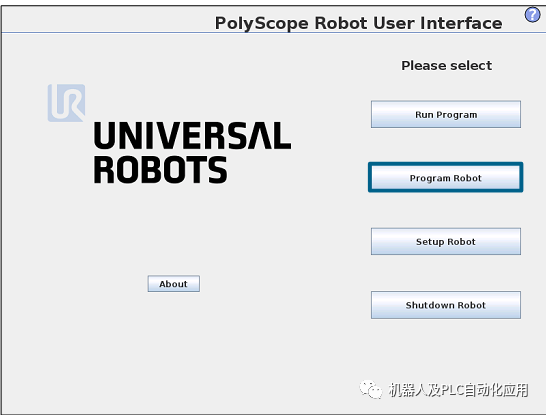
PolyScope软件系统介绍:
PolyScope
• 优傲公司开发
• 免费更新
操作系统
• Debian Linux
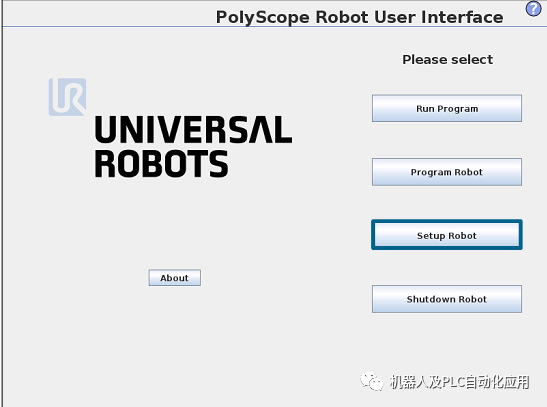
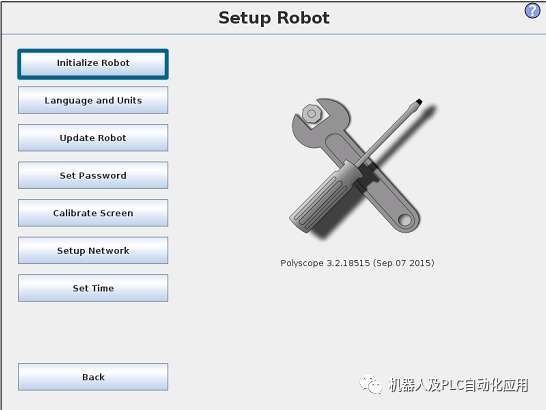
设置机器人
• 针对系统软件的设置
• 系统软件设置
• 初始化机器人
• 语言和单位选择
• 更新机器人
• 设置密码
• 校准屏幕
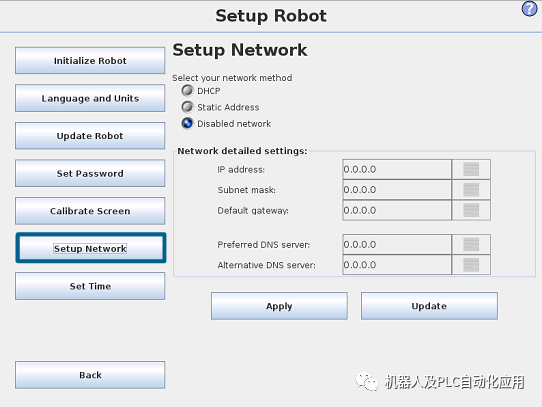
• 设置网络
• 设置时间
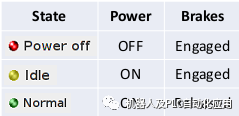
初始化机器人
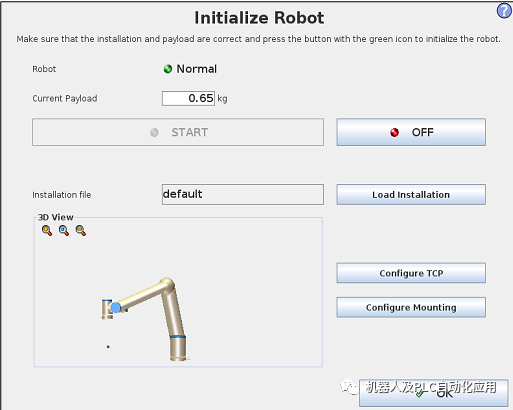
• 机器人状态
初始化机器人
• 检查负载设置
• 点“开”:上电
• 点“启动”:释放刹车
反驱动模式
当靠近碰撞区域,用反驱动模
式拉机器人手臂到安全位置
• 语言
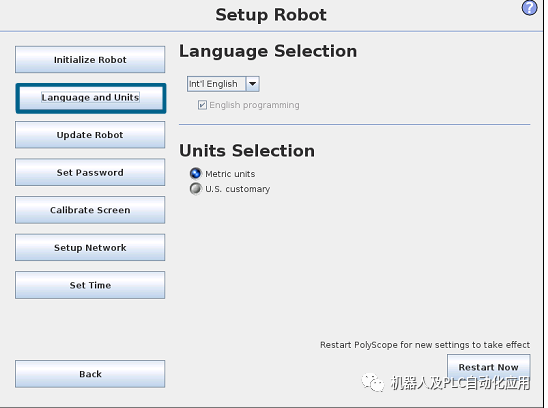
• 20 种语言
• 编程选用英语时可保持程
序指令名字为英语
单位
• 公制
• 英制
设置密码
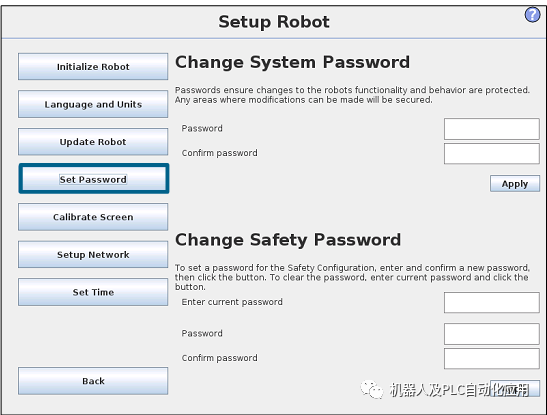
• 系统密码
• 密码保护限制进入软件
• 安全密码
• 修改安全设置时需要密码
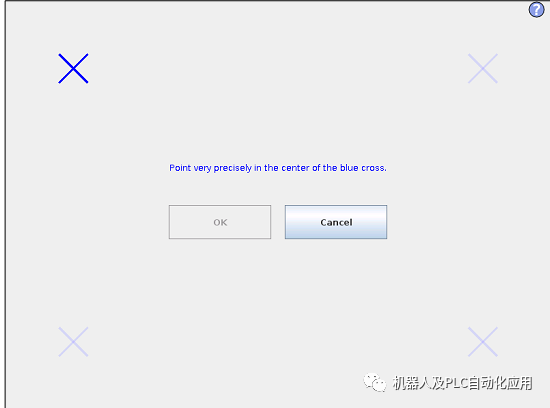
• 校准触摸屏
• 点中四个角的校准符号
校准屏幕
• 网络参数配置
在这个菜单能设置机器人的IP 地址 设置网络.
设置时间
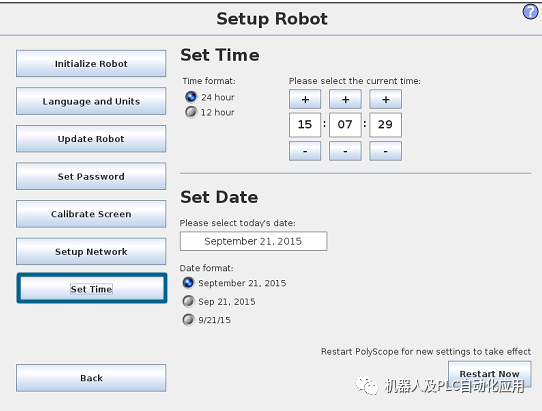
• 时间
• 时间格式
• 24 小时
• 12 小时
• 日期
• 日期格式
机器人编程
• 窗口概览
程序
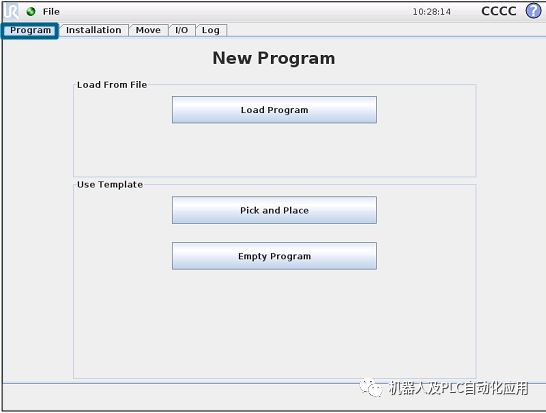
• 导入现有的程序
• 创造新程序
安装设置窗口
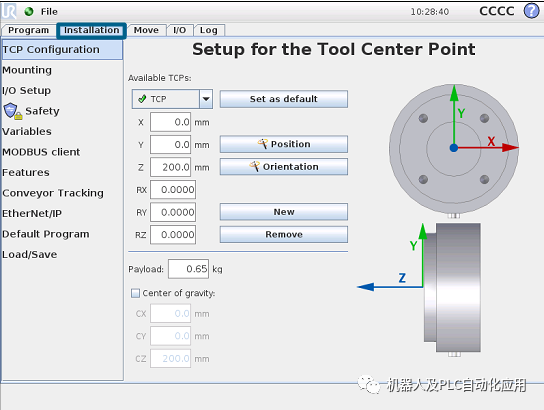
• 设置
• 环境设置
• 安全设置
移动窗口
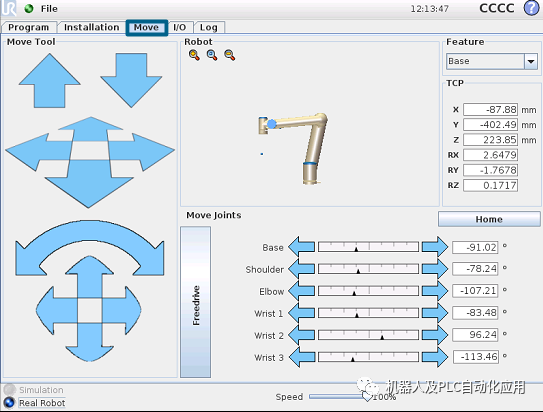
移动
• 手动示教机器人
• 显示实际位置
责任编辑:xj
原文标题:UR 优傲机器人简单操作
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
百变机器人YY上岗记2016-01-25 4900
-
机器人Python仿真软件介绍2021-12-20 1873
-
优傲机器人UR+平台首个中国开发者亮相工博会2017-11-15 6693
-
优傲机器人推出了旗舰版本e-Series 协作式机器人新品2018-06-22 5855
-
优傲机器人在深圳宝安壹方城举行了乔迁仪式庆典2019-03-12 4163
-
优傲机器人将亮相中国国际机器人与自动化展览会2019-05-17 3390
-
优傲机器人助力日本汽车工厂自动化2019-07-02 1033
-
优傲机器人推出Polyscope 5.6版本软件 大幅缩短了协作机器人编程时间2020-01-18 2328
-
RNB Cosméticos遇到了优傲机器人的协作式机器人2020-05-09 2880
-
优傲机器人系统改造,带来更大应用价值2020-06-18 808
-
优傲协作式机器人更低成本和更稳定的生产方案2020-07-09 2962
-
优傲机器人便是协作机器人领域的上佳之选2020-12-10 2267
-
优傲协作机器人e系列的简单介绍2022-05-08 1072
-
优傲机器人升级高负载协作机器人,助力客户生产效率飞跃2024-10-25 1673
全部0条评论

快来发表一下你的评论吧 !
