

模块化机器人SMORES-EP的并行自组装,实现了最短的模块运行距离
电子说
描述
作者是宾夕法尼亚大学GRASP实验室在读博士生—刘超,主要从事模块化机器人的研究,包括硬件设计、控制及运动规划算法、决策等,在各大机器人会议和期刊发表论文多篇,包括ICRA,IROS,RSS以及RA-L,并获得IROS最佳搜索救援机器人论文提名。
本文将分享他在ICRA 2020上的最新工作:模块化机器人SMORES-EP的并行自组装方法。该方法实现了最短的模块运行距离并通过实验验证了方法和对接控制的可靠性。
一、引言
自重构模块化机器人由一种或几种形态的模块构成,模块之间可以通过相同的连接方式组合成不同的形态,并且可以通过连接装置传递力、力矩以及交换信息。这种机器人可以像传统的机器人一样通过改变关节变量来调整姿态,做出不同的行为,例如抓取、操纵和移动,同时还可以对自己的形态做出很大程度上的改变,即通过改变模块之间的连接方式实现了关节拓扑结构的改变,从而更好地适应不同的环境、行动或任务。自重构模块化机器人一般分为三种类型:chain-type, lattice-type和mobile-type [1]。SMORES-EP(图1)是一种混合类型机器人,可以实现上述三种类型的模块化机器人的所有运动形式。
图 1:一个SMORES-EP有四个自由度和四个连接器,两个模块之间一共有17种不同的连接方式。
每个SMORES-EP模块有四个EP-Face连接器[2] 和四个自由度,独特的运动学结构使得任意两个模块之间存在着17种连接方式,因此SMORES-EP模块可以组成种类繁多的不同形态来适应不同的环境和任务。比如在图2a中,7个SMORES-EP模块组成了一个可以快速移动的小车的形态,从而能够快速地在地面上移动完成探索、运输等任务,但是当遇到崎岖不平的洼地时,这种小车形态并不利于运动,因此这些模块可以变形成蛇的形态(图2b),从而可以通过这类地形[3]。
图 2:(a)7个SMORES-EP模块可以形成一个可以快速移动的小车, 从而能够快速移动;(b)同时可以变形成一条蛇来通过崎岖的地形。
每个SMORES-EP模块的左轮和右轮两个自由度赋予了其在地面上以差分驱动小车的形式自由运动的能力,这个特性使得每个模块可以独立于其他模块单独运动。配合SMORES-EP的自重构能力,多个模块可以表现出一定的群体行为。类似于自然界中生物的群体智慧行为,比如一只小蚂蚁的行为能力极其有限,但是一群蚂蚁却能够表现出惊人的、极大超出每个个体能力极限的行为。
一个SMORES-EP模块虽然有4个自由度,但是运动能力有限,能适应的环境和任务场景也因此收到了很大限制,例如一个模块是无法通过一道较宽的沟壑的,但是三个模块可以组成一个蛇形从而通过这道沟壑。多个分散的模块协同工作、自主拼装成一个复杂形态的能力可以极大地增强这类模块化机器人的适应能力,使其完成任一单独的模块均无法完成的任务,这个运动规划过程称之为self-assembly planning。
二、模块化机器人并行自组装
1、机器人形态模型
一个模块化机器人形态(拓扑结构)可以用一个无向图G =(V,E)来表示,其中V是G的顶点的集合,代表着所有的模块,E是G的所有边的集合,每条边包含着表示模块间的连接方式的必要信息,这些信息取决于模块化机器人的设计[4]。任意两个顶点间存在唯一一条路径的无向图是树,一个树G=(V,E)可以相对于某个顶点转换成有根树,我们选取图的中心[5]为根节点模块。我们在[4]中提出了一个线性时间复杂度的算法来找到一个树状拓扑结构的模块化机器人的中心。例如,图3a是一个由三个 SMORES-EP组成的简单形态,对应的图G=(V,E)表示在图3b 中,其中根模块是2号模块。
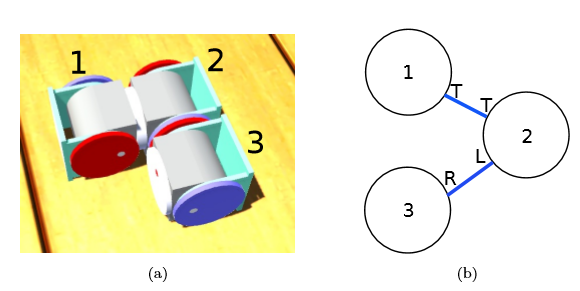
图 3:(a)三个SMORES-EP组成的一个形态和(b)对应的图G=(V,E)。
2、并行自组装
我们这里提出一种可以并行的自组装方法。已知的条件是每个模块当前的位置(图4a)以及期望的最终形态(图4b)。首先要解决的是最优地找到每个模块对应到最终形态中的角色。所有SMORES-EP模块都是一模一样的,因此并没有固定的角色分配方案,但是好的分配方案可以使组装的过程更快、更容易。我们这里期望所有模块需要运行的距离能够最短。为了达到这个目的,首先将目标形态展开到地面上、计算根模块,基于根模块,可以快速计算出其余每个模块的2D位姿。基于现实中每个模块当前的位置,我们可以通过解决一个任务分配(task assignment)的问题来找到最优的分配方案。
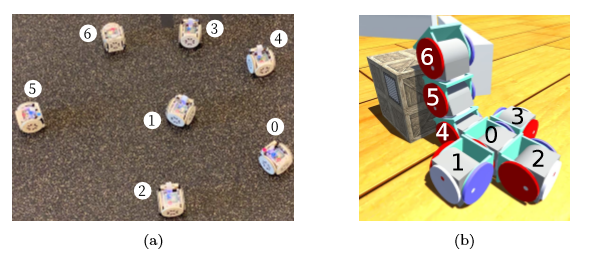
图 4:(a)七个模块的初始状态;(b)期望变成的形态。
当每个模块都被最优地分配了相应的角色之后,自组装便可以开始。从根模块开始,处于同一深度的模块可以同时开始组装的过程,直到所有处于叶子节点的模块完成最终的组装动作。一个组装动作可以简单表示成一个元祖(mi, ci,mj,cj),代表着将模块mi的连接器ci与模块mj的连接器cj相连接。对于模块化机器人,这个对接的过程往往费时费力,因此我们提出一种可靠的方法来保证对接的成功。就像把大象放进冰箱一样,我们把对接的过程分成三步:第一步是导航,即控制SMORES-EP 模块快速稳定地到达一个接近目的地的地方(图5a),在这个过程中需要对多个模块进行路径规划; 第二步是调整姿态准备对接(图5b); 第三步是靠近对应模块完成对接(图5c)。详细的控制器设计及其表现可以查看我们的论文。
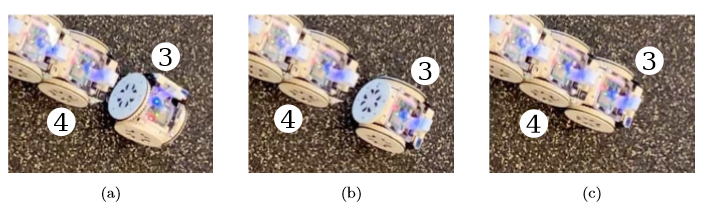
图 5:执行组装动作(3,T,4,B)。(a)控制 3 号模块导航至一个接近目标的 位置,(b)调整姿态准备对接,(c)靠近 4 号模块完成对接。
三、 实验及结论
在论文和视频中我们演示了三个实验:
1. 7个分散的模块自组装成一个带有机械臂的小车从而可以接触高台(图4b);
2. 9个分散的模块自组装成一个可以任意方向移动的小车(图6a);
3. 7个分散的模块自组装成一个差分驱动四轮车从而可以推动重物(图6b);
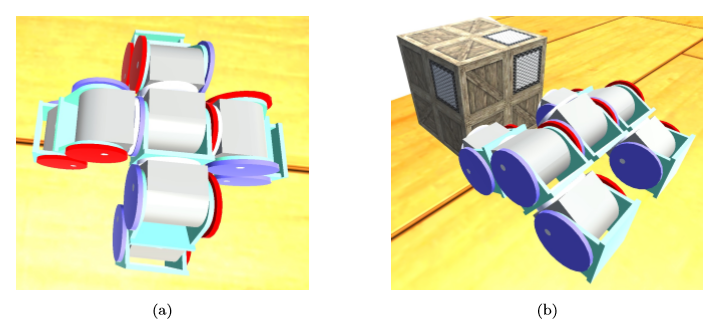
图 6:(a)9 个分散的模块自组装成一个可以任意方向移动的小车;(b)7 个分散的模块自组装成一个差分驱动四轮车从而可以推动重物。
在这三个实验中我们展示了并行自组装的全过程,验证了我们的方法和对接控制的可靠性。在第三个实验中,特殊的地方是需要helping module的帮助来完成一些组装的动作。单个模块依赖左右轮进行运动,因此在对接的时候无法直接控制这两个连接器的角度,需要一个helping module辅助抬起模块以完成连接器角度的调整。关于这个工作更多的内容可以在ModLab网站的post查看,也可以在SMORES-EP项目主页上查看更多关于SMORES-EP的研究工作。
参考文献
[1] M. Yim, W. Shen, B. Salemi, D. Rus, M. Moll, H. Lipson, E. Klavins, and G.S.Chirikjian,“Modular self-reconfigurable robot systems[grand challenges of robotics],” IEEE Robotics Automation Magazine, vol. 14, no. 1, pp. 43–52, 2007.
[2] T. Tosun, J. Davey, C. Liu, and M. Yim, “Design and characterization of the ep-face connector,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, pp. 45–51.
[3] C. Liu, M. Whitzer, and M. Yim, “A distributed reconfiguration planning algorithm for modular robots,” IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 4231–4238, 2019.
[4] C. Liu and M. Yim, “Configuration recognition with distributed information for modular robots,” in IFRR International Symposium on Robotics Research, Puerto Varas, Chile, 2017.
[5] G.L.McColm,“On the structure of random unlabelled acyclic graphs,” Discrete Math., vol. 277, no. 1, pp. 147–170, 2004.
责任编辑:xj
-
模块化嵌入式机器人控制单元设计2022-03-25 4512
-
工业机器人模块化教学工作站是什么2021-09-28 2399
-
安全机器人的模块化系统:不同的应用需要合适的传感器技术解决方案2020-05-07 2380
-
嵌入式模块化机器人的路径怎么规划?2019-08-20 1777
-
协作机器人编程模块化的需求如何满足?2019-06-15 4768
-
机器人底盘的模块化运作是低成本运营的必然趋势2018-07-20 5820
-
基于模块化设计方案的养老机器人2018-02-23 1121
-
基于蓝牙技术的机器人模块化无线通信设计2018-02-22 6071
-
蓝牙技术的机器人模块化无线通信2017-09-01 1019
-
基于DSP的模块化教育机器人硬件系统方案2014-05-14 7349
-
创意之星模块化机器人套件完全介绍2011-03-05 11048
-
模块化机器人的惯性参数辨识研究2009-11-26 393
-
基于optotrak的模块化机器人实验研究2009-08-15 631
-
模块化机器人拓扑重构规划研究2009-05-25 705
全部0条评论

快来发表一下你的评论吧 !
