

Linux操作系统编程讲解:信号捕捉
电子说
描述
前面我们学习了信号产生的几种方式,而对于信号的处理有如下几种方式:
默认处理方式;
忽略;
捕捉。
信号的捕捉,说白了就是抓到一个信号后,执行我们指定的函数,或者执行我们指定的动作。下面详细介绍两个信号捕捉操作参数:signal和sigaction。
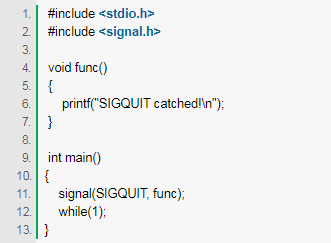
##signal函数
函数原型:
sighandler_t signal(int signum, sighandler_t handler);
其中,sighandler定义是这样的:typedef void (*sighandler_t)(int);
函数作用:注册一个信号捕捉函数,也就是说,收到了某个信号,就执行它所注册的回调函数。
函数参数:
signum:信号编号,尽量用宏来写,而别用数字,这样更适合跨平台;
handler:注册的回调函数;
函数缺陷:
由于历史原因,该函数在不同版本的Unix和Linux系统中可能起到的效果不一样,所以跨平台性不佳,尽量避免使用它,取而代之使用通用性更好的sigaction函数。
##sigaction函数
函数原型:
int sigaction(int signum, const struct sigaction act, struct sigaction oldact);
函数作用:与signal函数类似,用来注册一个信号捕捉函数;
返回值:
成功:0;失败:-1,并设置errno;
参数:
signum:信号编号,尽量用宏来写,而别用数字,这样更适合跨平台;
act:传入参数,新的信号捕捉方式;
oldact:传出参数,旧的信号捕捉方式
这里特别要注意参数中struct sigaction结构体,这也是这个函数的难点所在,下面详细说明:
struct sigaction结构体
原型:
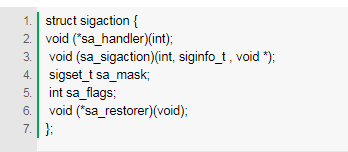
这个结构体成员很多,又很多是回调函数的形式,令人望而生畏。但实际上,需要掌握的只有三个。
首先,sa_restorer和sa_sigaction这两个成员一个已经被弃用了,另一个很少使用,所以我们暂且不管它们,重点掌握剩下的三个。
(1) sa_handler:指定信号捕捉后的处理函数,即注册回调函数。该成员也可以赋值为SIG_IGN,表示忽略该信号,也可注册为SIG_DFL,表示执行信号的默认动作。
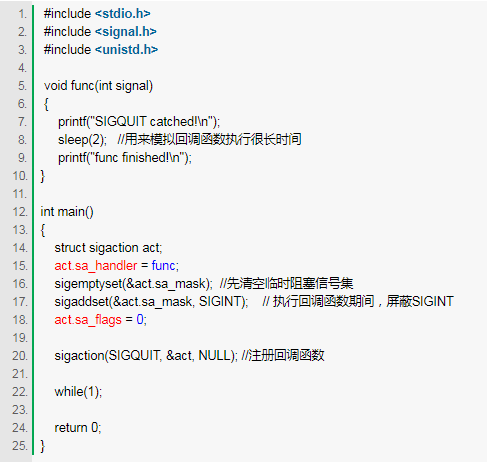
(2) sa_mask:临时阻塞信号集(或信号屏蔽字)先来看这样一个情景:
某个信号已经注册了回调函数,当内核传递这个信号过来时,会先经过一个阻塞信号集,先阻塞掉部分信号。再去执行对应的回调函数。如下图示:
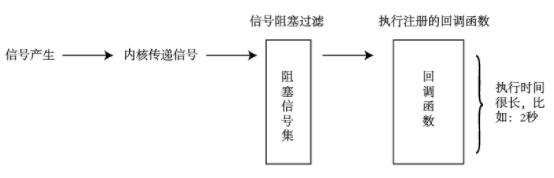
假如说,这个回调函数回调执行的时间比较长,比如2秒,在这2秒里,又有其它的信号过来,那进程是暂停当前回调函数,去响应新的信号,还是不管新来的信号,先把当前回调函数处理完再说?
正确的做法是,在执行回调函数期间,使用sa_mask临时的去替代进程的阻塞信号集,保证回调函数安心的执行完毕,再解除替代。注意:这个过程仅仅发生在回调函数执行期间,是临时性的设置。
(3) sa_flags:通常设置为0,表示使用默认属性。
再来看另外一个场景:
比如进程对SIGQUIT注册了回调函数,当回调函数在执行期间,又来了SIGQUIT函数,这时,进程是响应还是不响应该信号?这就是sa_flags的一个作用,当其设置为0时,表示使用默认属性,也就是先不响应该信号,而是执行完回调函数再处理此信号。
另外,阻塞的常规信号不支持排队,也就是说,执行回调函数期间,再来千百个同个信号时,系统只记录一次。而后面的32个实时信号则支持排队。
责编AJX
-
Linux 系统编程的难点是什么2023-06-28 1177
-
为什么我们要掌握Linux系统编程?2023-05-17 2180
-
是否可以为linux操作系统编译并在基于debian的rasperry操作系统中运行?2022-12-06 533
-
Linux操作系统安装与使用方法2021-12-23 1341
-
Linux操作系统安装与使用2021-11-05 1049
-
原创丨Linux系统编程篇丨迅为IMX6ULL-对应视频讲解2021-07-30 2259
-
Linux操作系统知识讲解:走进内存2020-08-28 3298
-
Linux操作系统下C语言编程入门.pdf2018-05-17 2444
-
linux系统编程_中文版2017-10-29 1058
-
基于Linux操作系统下C语言编程入门2017-10-27 1070
全部0条评论

快来发表一下你的评论吧 !
