

MLX90316 三轴旋转位置传感器的前端校准
描述
本应用笔记介绍了 MLX90316 三轴旋转位置传感器在设备执行角位置提取之前的前端校准。该文件还描述了动态偏移消除机制、灵敏度失配、正交性、信号非线性和系统的整体精度。
描述
如图 1 和图 2 所示,如果磁铁(径向磁化)在 MLX90316 上方旋转,则三轴霍尔板提供两个正交信号 Vx 和 Vy(分别用于沿 X 轴和 Y 轴的磁通密度)。
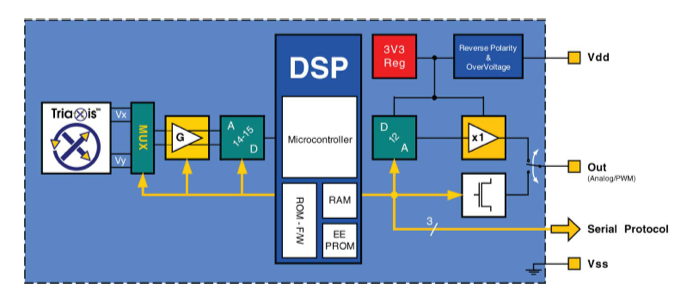
这些霍尔信号通过采用经典偏移消除技术的全差分模拟链进行处理。调节后的模拟信号通过 ADC 进行转换,并提供给 DSP 模块进行进一步处理。
抵消
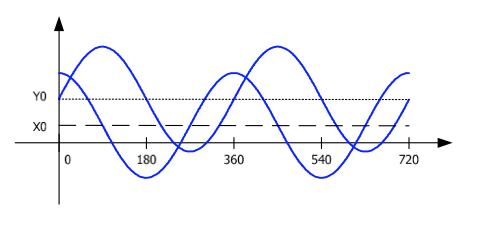
虽然片上动态偏移消除机制(霍尔板正交旋转和斩波稳定放大器),模拟信号可能会显示残余偏移。正弦信号上此偏移的表示如图 3 所示,其中 X0 和 Y0 偏移均被放大(X0 和 Y0 是模拟电平 V_x,0 和 V_y,0 的数字表示)。偏移值通常非常小且取决于温度。
灵敏度不匹配
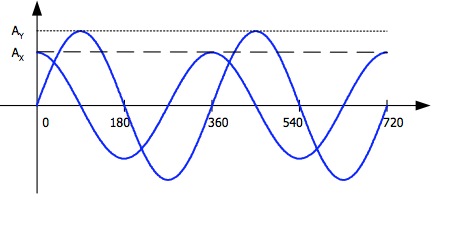
尽管两个霍尔信号(V_x 和 V_y)均由匹配的霍尔板生成并通过公共多路复用放大链放大,但这两个信号可能会显示出残余的幅度差异。这种不匹配的两个主要原因是 IMC 相对于霍尔板星座的非完美对齐以及不同三轴霍尔板灵敏度之间的差异。幅度失配的图示如图 4 所示。
正交性
正交误差,也称为正交误差,是正弦和余弦信号之间的相位误差。这意味着这两个信号的相位分离不完全是 90 度。传感器的 DSP 将不断调整正弦与余弦的关系,以获得 90 度的恒定相位分离。
信号非线性
在正常操作中,信号非线性可以忽略不计。它的签名很容易识别;超过 360 度的四个周期。因此,它可以解决非线性的主要来源,即磁饱和(IMC 位置上的应用场大于 70mT)。
编辑:hfy
-
探索HRPS霍尔效应旋转位置传感器:工业与交通领域的理想之选2025-12-11 731
-
Melexis推出高性能磁位置传感器芯片MLX904252025-02-28 1425
-
基于MLX90316的汽车油门踏板的设计与研究2023-11-10 467
-
介绍一款自适应调整、数字输出的旋转位置齿轮传感器MLX902172022-10-19 2854
-
MLX90367三轴位置传感器芯片的数据手册免费下载2021-03-29 1534
-
有没有MLX90316 SPI使用程序2020-06-15 1691
-
Melexis推出Triaxis霍尔位置传感器系列新产品——MLX903732019-06-26 2376
-
Melexis推出第三代Triaxis霍尔传感器MLX90374 首款提供多路输出2019-05-14 5548
-
基于MLX90316绝度角度位置传感器板2019-04-29 18857
-
基于磁敏角度技术的拉线式位移传感器设计与应用2018-11-14 2539
-
基于MLX90316的磁性角度传感器设计方案2018-11-06 3027
-
霍尔效应旋转位置传感器及其应用2018-11-05 3333
-
基于MLX90316的磁性角度传感器的设计方案2013-12-03 22524
-
MLX90316使用求助2012-05-24 6972
全部0条评论

快来发表一下你的评论吧 !
