

应用于驱动无刷电机的MSK4310功能及其优势
描述
MSK4310是一个完整的闭环速度模式控制器,用于驱动无刷电机。该设备不需要外部速度反馈设备即可运行。本应用笔记讨论了MSK4310的功能及其优势。
将电动机连接到正确的霍尔输入和输出相位。然后可以开始评估电路。V +电压设置为28伏,可变直流电源电压输入到SPEED COMMAND输入。大约0.33V的输入电压将使电动机空载旋转。将直流电压增加到最高约4.1V的最高速度,可以提高电动机的速度。在约4.1V时,MSK4310的输出级已达到对电动机的最大电压(最大占空比为100%),并且不再对输出驱动器进行调制。电机的最大速度约为7600RPM。检查误差放大器的输出将确认其输出已经超过最大PWM输入电压4.1V。高于4。
为演示板开发的电路包括一个用于TACH OUT脉冲的平均电路,给出了用于确定系统机械响应的脉冲的DC表示-见图1和2。ANALOG TACH OUT的输出按比例缩放以匹配由TACH OUT脉冲产生的平均电压。
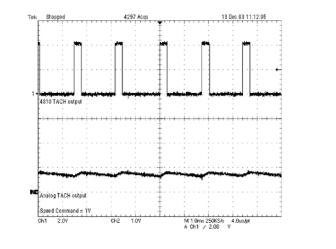
图1对于1V输入到SPEED COMMAND的TACH OUT的脉冲序列输出和ANALOG TACH OUT的电压波形输出
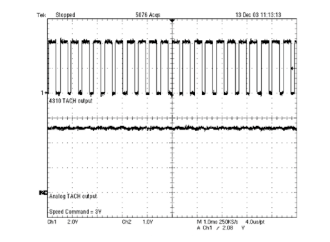
图2对于3V输入到SPEED COMMAND的TACH OUT的脉冲序列输出和ANALOG TACH OUT的电压波形输出
在输入各种刺激(无论是阶跃命令电压还是交流正弦波)的同时查看ANALOG TACH OUT,将可以根据系统中电机的期望响应量身定制误差放大器中的积分器响应。将SPEED COMMAND的输入频率与ANALOG TACH OUT的频率进行比较,即可进行带宽测量。
为了查看实际情况,在“速度命令”中设置了步骤更改。对于输入,使用了2V偏移量之上的1V步进。2V信号将确保控制器在闭环控制中运行良好。2V之上的1V步进将导致整个系统中速度的步进变化。
编辑:hfy
-
无刷电机驱动板怎么接线2023-12-14 9207
-
无刷电机驱动方案的应用2024-10-21 5509
-
永磁无刷电机及其驱动技术-R.Krishnan-(柴凤译-中文版.PDF)2017-03-02 93498
-
GVM电机优势有哪些?主要应用于哪些方面?2021-09-30 1747
-
霍尔传感器应用于无刷电机驱动控制2009-11-14 2427
-
无传感器的直流无刷电机控制器ML4425及其应用(1)2009-07-09 3787
-
驱动你的无刷电机2013-09-05 1421
-
永磁无刷电机及其驱动技术-466页-(美)克里斯南2016-12-13 3676
-
无刷电机驱动器THMC40/41的结构特点、引脚功能及应用范围2019-12-20 5981
-
BLDC直流无刷电机驱动2021-09-18 5332
-
无刷电机必须要驱动器才能转吗?2023-09-28 5337
-
直流无刷电机的原理及其控制2023-11-09 1207
-
无刷电机详解及其应用2025-06-07 9747
-
无刷电机驱动板选购攻略,避开选型常见误区2026-04-30 3880
-
无刷电机的驱动原理及驱动电路解析2026-05-13 649
全部0条评论

快来发表一下你的评论吧 !
