

霍尔解决方案相比,GMR(巨磁阻)技术有何优势?
描述
汽车工业继续推动更有效的燃料消耗和减少二氧化碳排放。与现有的霍尔解决方案相比,GMR(巨磁阻)技术提高了性能并扩展了操作能力。
GMR传感器(磁阻效应磁场传感器)的特征在于它们对磁场的响应,而这与频率无关。因此,有可能以kHz的出现率获得良好的灵敏度和最大的输出信号。
GMR技术
GMR技术利用了在各种铁磁多层中观察到的量子磁阻机制。这项研究获得了诺贝尔奖,这要归功于Albert Fert和Peter Grunderb的研究。
该效果根据相邻铁磁元件的磁化强度显着改变了电阻。通过施加外部磁场来组织磁化方向。结果是电子对旋转取向的散射依赖性。
以下公式描述了磁阻:
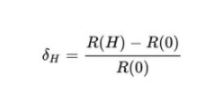
其中R(H)是样品在磁场H中的电阻,R(0)对应于H =0。此表达式的替代形式可以使用电阻率代替电阻。
基本原理取决于电子的旋转。在磁阻电阻器中,电子散射速度随电子自旋和介质的磁取向的相互作用而变化,电子在该介质中行进-在磁场的作用下GMR换能器的电阻发生变化。
GMR传感器对于开发创新的混合传感器模型特别有希望,该模型可通过电磁手段检测和表征导电多层板中的地下不连续性。这些混合传感器集成了一个常规线圈和一个GMR传感器,该线圈在被检材料中产生交变磁场,而GMR传感器则是由于相互作用而产生磁场干扰的检测元件。
像霍尔效应技术一样,GMR与信号调理电路紧密相连。输出信号大于霍尔信号,具有更高的信噪比和更低的输出信号抖动。这些质量使GMR传感器可以检测到更大距离的物体。
评估GMR传感器选择的主要特征包括几个关键要素。首先,首先要考虑的是易于设计,“解决方案必须是一个完全集成的模块,包括磁体和保护组件,以在用户完成的传感器设计中实现最佳性能。包括磁体和EMC保护,大大简化了GMR传感器的设计。” Allegro发言人说。第二个考虑因素是外部磁场干扰及其干扰输出信号的能力。通过使用差分传感技术可以消除共模场。但是,共模场以外的杂散场会破坏磁传感器的输出信号,因此在设计过程中需要加以考虑。”
主要设计考虑因素是优化磁路,以利用GMR技术获得卓越的性能,因此,这就是原因。这是必须的,由GMR IC供应商来完成。熟悉GMR设计的人员最好将GMR IC和磁体设计为系统。
变速箱设计需要更小,更轻,以提高效率和燃油经济性。这样对安装位置和速度传感器周围的公差产生了很大的空间限制。解决方案是通过在较远的气隙处进行操作而提供更大的灵活性,而不会折衷在较近的气隙处起作用的先前零件的预期性能。
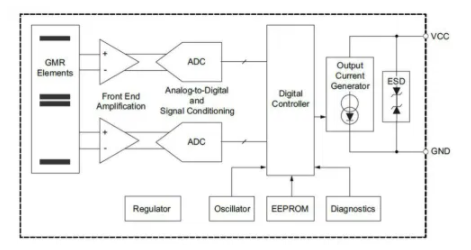
图1:ATS19580的功能框图
Allegro MicroSystems宣布推出其ATS19580,这是业界首个完全集成和重新集成的巨型磁阻传输方向和速度传感器(GMR)。由于具有高度的集成性,ATS19580具有很高的抗振性,并减小了系统尺寸,复杂性和成本,从而节省了燃料。Allegro的专有技术和领先的数字处理技术为传输速度感应设定了新的标准。ATS19580的功能简化了客户速度传感器的集成,并使他们能够设计安全且省油的系统(图1和2)。
“在设计GMR传感器期间,最关键的部分是传感器的工作范围和信号精度。要在较远的气隙下运行,但不能为我们的客户和汽车制造商在总的有效气隙范围内留有足够的公差,则该汽车制造商将不被视为解决方案,因为这会增加设计这种精确机械系统的成本。同样,必须权衡信号精度,因此必须保持动态气隙能力,抗振动性和热梯度补偿。这些算法用于终端系统补偿的开发已经进行了二十年,” Christine说。
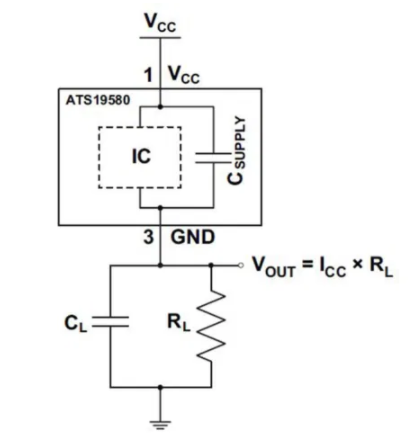
图2:ATS19580 GMR传感器的典型应用电路
“传输是ATS19580LSN的目标市场。但是,确定用于速度,方向或脉冲计数的任何齿轮肯定可以从传感器的功能中受益。例子包括休闲车(即UTV,雪地车,叉车等),”克里斯汀说。
霍尔和GMR技术
磁场检测使用GMR和霍尔效应传感器。两种技术都与集成电路处理兼容。
磁阻传感器提供的灵敏度高于霍尔传感器。GMR传感器的灵敏度可通过选择膜厚和线宽来调节。相反,霍尔效应有利于高度线性的测量,而没有饱和效应直至极高的场强(图3)。
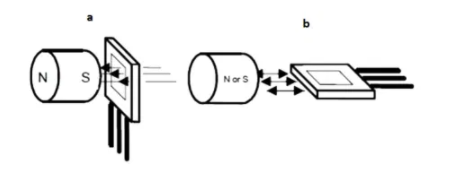
图3:霍尔(a)和GMR(b)传感器布局
霍尔效应传感器可以检测垂直磁场,而磁阻传感器可以处理平行磁场。因此,GMR传感器由单极传感组成,用于精密,非接触式位移应用,例如医疗分析仪和磁场编码器。但是,霍尔效应传感器可确定CNC机床的齿轮齿距并测量传输速度。
驾驶员辅助系统(ADAS)在灵敏度方面需要更高的准确性和可靠的系统。巨磁阻(GMR)可以很好地满足这些高级要求,可以代替霍尔效应作为传感换能器。原则上,GMR和霍尔都是磁传感器,但是两者的基本操作和功能不同。
与GMR技术不同,基于霍尔的磁感应场的最小差分值小于30高斯,该差分值可低至5高斯。GMR需要更严格的设计条件,并提供定义的线性范围,且理想的峰-峰磁信号幅度应在100高斯范围内。
通常,所有设备都可以在磁性设计范围之外运行,而不会造成永久性损坏。但是,取决于信号处理算法,性能可能会下降。在GMR传感器中,这种降级的成本可能更高。
编辑:hfy
-
ARM-based相比ARM cortex有何优势?2024-04-24 713
-
基于巨磁阻的快板集成电路2019-09-23 2470
-
隧道磁阻技术的应用2020-07-31 2057
-
网表仿真与RTL仿真相比有何优势2021-11-04 5607
-
GMR磁头技术2010-01-22 3673
-
Allegro 新增GMR传感器IC2019-07-13 5356
-
巨磁阻传感器应用2019-12-18 6355
-
巨磁阻电流传感器的原理解析2020-09-17 5889
-
Allegro霍尔效应传感器解决方案满足所有行业应用要求2021-08-24 8469
-
AMR、GMR和TMRc传感各自有什么特色2022-02-15 11567
-
GMR巨磁传感不止有高精度2022-02-17 5962
-
三大磁阻效应传感器技术对比2022-03-10 13362
-
巨磁阻传感的三种应用模式Sisyphus2022-06-27 3860
-
GMR技术节省汽车燃料2022-07-27 2233
-
GMR 技术可节省汽车的燃油经济性2022-08-08 2523
全部0条评论

快来发表一下你的评论吧 !
