

为什么选择传感器融合?
电子说
描述
MEMS传感器包括:加速度传感器,用于测量线性加速度和地球重力矢量;陀螺仪,用于测量角速度;磁力计,用于测量地球磁场以用于航向确定;压力传感器,其用于测量气压以用于海拔确定。通过将这些组件组合到传感器融合解决方案中,应用程序的数量变得非常大。本文通过描述一些使用互补滤波器的示例,说明了如何使这些传感器在传感器融合解决方案中协同工作。卡尔曼滤波器和扩展卡尔曼滤波器(EKF)。
对于自由落体检测,屏幕旋转,计步器,倾斜测量和运动检测等应用,加速度计本身可以执行任务。但是,对于其他其他高级应用程序,包括基于位置的服务,增强型运动游戏,行人航位推测导航,机器人平衡,空中鼠标,人体跟踪,无人飞行器等,为实现更好的性能,必须融合MEMS传感器。系统级别的准确性,分辨率,稳定性和响应时间。传感器融合是一组用于预测和过滤的自适应算法。它利用来自各种传感器的不同和互补的信息,以一种智能的方式将它们组合在一起,以优化系统性能并启用新的惊人应用程序。
为什么选择传感器融合?
在设计使用多个MEMS传感器的系统时,重要的是要了解加速度计,陀螺仪,磁力计和压力传感器的优缺点。
传感器融合解决了由3轴加速度计和3轴陀螺仪或3轴加速度计和3轴磁传感器组成的6轴模块的关键运动传感性能问题。1)当陀螺仪随时间漂移时,带有加速度计和陀螺仪的6轴惯性模块会失去其绝对方向,因此需要进行校准以恢复准确的航向参考值。2)带有加速度计和磁力计的6轴模块在环境中存在含铁材料的情况下容易损坏数据。3)9轴模块, 带加速度计,陀螺仪 和磁力计 消除了独立传感器解决方案中出现的漂移。但是这些可能会受到电磁干扰。需要融合传感器数据的算法来补偿电磁干扰。
传感器融合的目的是将每个传感器的测量数据作为输入,然后应用数字滤波算法来相互补偿,并输出准确且响应迅速的动态姿态(俯仰/侧倾/偏航)结果。
辅助滤波器
某些应用程序(例如机器人平衡,相机图像稳定 和3D指针) 在系统中安装了加速度计和陀螺仪。当系统静止时,加速度计可以提供准确的倾斜角测量。当系统旋转或运动时,加速度计将无法跟随快速运动。陀螺仪可以输出动态角速度数据。在对该数据进行时间上的单个积分之后,可以计算出角位移或倾斜角,但是由于陀螺仪偏置漂移,该角度从长远来看将变得不准确。
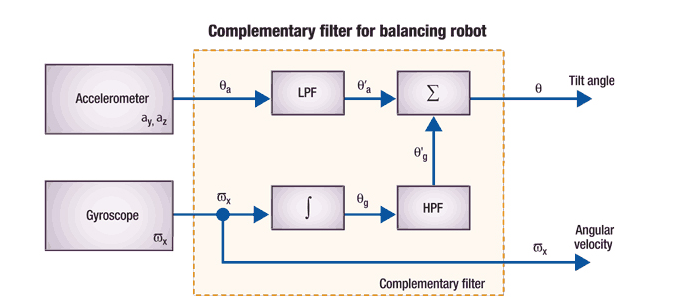
互补滤波器是融合加速度计 和陀螺仪以及可选磁力 计的简单方法,以获得准确和响应迅速的俯仰/侧倾/偏航姿态输出。它由用于加速度计的通用低通滤波器和用于陀螺仪的高通滤波器组成,与卡尔曼滤波器相比,它更易于理解和实现。以下示例说明了如何实现用于机器人自平衡的互补滤波器。
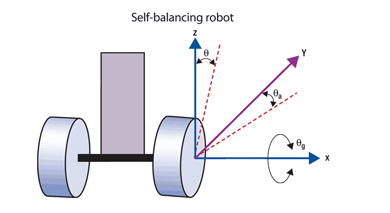
如上图1所示,机器人具有一个用于测量静态倾斜角θa的双轴或三轴加速度计,以及一个用于测量动态倾斜角θg的单轴或双轴陀螺仪。互补滤波器然后融合这些测量结果以获得最终倾斜角θ。微处理器使用此信息和来自陀螺仪的角速度信息来控制电机,以平衡机器人。互补滤波器框图如图2所示,具有双轴加速度计和单轴陀螺仪配置。
双轴加速度计
编辑:hfy
-
多传感器数据融合算法最关键的是2023-12-13 2488
-
多传感器信息融合使用的处理器是单片机还是电脑?2020-08-26 2394
-
汽车传感器融合系统浅析2020-07-31 3204
-
基于MCU的智能传感器融合设计的示例实现介绍2019-07-12 2053
-
MCU与智能传感器融合的设计方案2019-05-23 6701
-
什么是传感器融合?2018-12-10 2853
-
典型的传感器融合软件架构2018-11-08 1382
-
深度解析多传感器信息融合技术2018-11-07 3698
-
基于多传感器数据融合的智能机器人设计2018-11-01 2473
-
获得传感器融合设计的捷径2017-04-07 4212
-
传感器融合为 IoT 带来了智能传感器,所有行业都将获益2017-03-31 5182
-
多传感器信息融合技术2012-08-15 4619
-
传感器融合技术2012-04-06 2851
-
基于多传感器信息融合技术的防盗报警系统2009-08-07 1013
全部0条评论

快来发表一下你的评论吧 !
