

基于EPS系统的环形磁铁速度传感
描述
本文介绍并说明了电动助力转向(EPS)系统的操作,包括适当功能的基本要求以及霍尔效应开关和闩锁中环形磁铁的重要性。本文显示了典型的电动助力转向(EPS)系统的基本部分。
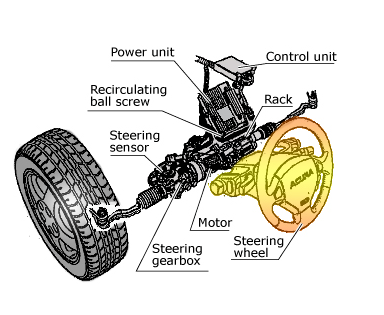
图1典型的EPS系统
正确控制电动助力转向(EPS)系统需要来自转向输入轴的速度和方向信息。该控制通常将同时来自高分辨率速度信息和相当粗略的位置信息。
双多极环形磁体可与霍尔效应双输出开关和锁存器矩阵一起使用,以提供所有必需的信息。图2显示了具有交替的南极和北极的高分辨率外圈和交替的极点的低分辨率内圈的磁体配置。
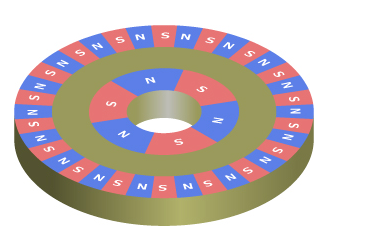
图2双分辨率环形磁铁
为了确定旋转磁体的方向,使用了单个霍尔效应传感器IC,具有来自两个单独的双极霍尔元件(A和B)的双路输出。(请参见图3。)由于两个霍尔元件在IC表面上相距一定距离,所以旋转磁体产生的信号中存在相位滞后。
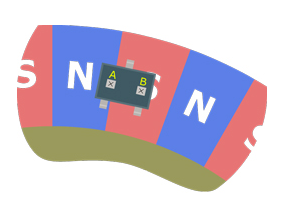
图3具有双输出双极霍尔效应器件的环形磁铁
在适当的磁极间距的情况下,所得的输出信号(图4中的元素A和元素B)是正交的,并且易于处理以提供两种状态的方向信息。本示例中使用的设备(双输出双极开关)的元件间距为1.5 mm。最佳磁极间距在元素A中提供峰值信号,在元素B中提供零信号。此间距对应的尺寸大约等于交变磁极之间的3.0 mm,或磁极周期为6 mm。
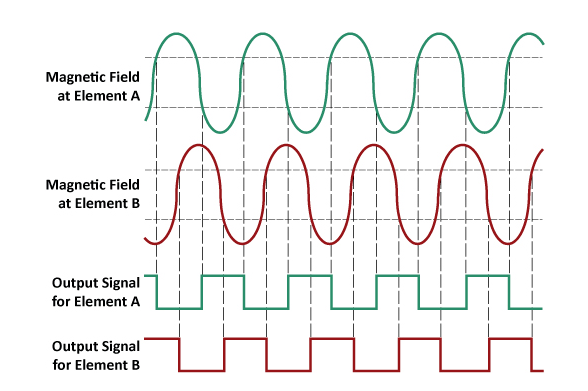
图4 A1230的正交输出
为了获得绝对位置信息,必须从单独的霍尔效应锁存传感器IC的输出中生成一个状态机。在双元件器件的信号对中引起的相同相位延迟可以通过单独的封装中的器件通过适当的封装放置而引起。如果将两个器件封装放置在与磁极周期相对应的相对角度位置,则两个IC的输出将完全同相。但是,如果封装间距为1.25×(T / 2),其中T为磁极周期,则输出将为正交。在此周期的任何倍数上都适用,例如2.25×(T / 2),3.25×(T / 2)或4.25×(T / 2)。
为了生成提供级联相位延迟的设备输出矩阵,必须将每个设备放置在磁极周期的递增小数倍处。例如,要获得三个具有级联输出的设备,可以将设备#1放置在任何位置,可以将设备#2放置为设备#1的1.33×(T / 2),而可以将设备#3放置为1.67×(T / 2)从设备#1。
编辑:hfy
-
多极环形磁铁为什么成为电机主流?2026-06-09 73
-
如何优化EPS文件以提高加载速度2024-10-30 2217
-
磁环有磁性吗?条形磁铁和环形磁铁哪个磁性强2024-01-11 4709
-
使用霍尔传感器和磁铁的Arduino速度计2023-01-03 1511
-
基于raspberry pi pico的EPS系统2022-07-15 2257
-
电动助力转向EPS——理论公式推导及simulink模型2021-06-29 3047
-
汽车电动助力转向系统EPS原理是什么?2021-05-13 2678
-
EPS系统的结构是怎样构成的?EPS系统有哪几种控制方式?2021-05-12 4332
-
EPS MCU在市场扮演什么角色2019-07-10 2703
-
基于英飞凌产品的汽车EPS方案介绍2018-12-05 4295
-
使用霍尔效应传感器检测磁铁的存在并制作速度计,防盗报警器等等!2018-12-04 3184
-
Allegro MicroSystems, LLC发布全新三线真零速 表面安装型磁性速度传感器IC2016-06-30 970
-
单片机的EPS驱动电路设计2012-08-10 3617
-
环形软磁铁氧体磁心2009-08-22 1000
全部0条评论

快来发表一下你的评论吧 !
