

霍尔效应集成电路双极性开关的基本原理和操作
描述
本文是一份应用笔记,讨论了双极性开关的基本原理和操作,包括锁存模式特性和负单极性或负开关模式特性。本文档还介绍了使用双极性开关时必需的设计组件以及如何计算功耗。
双极型传感器IC设计为敏感开关。(请注意,术语“双极”是指磁极性,与双极半导体芯片结构无关。)双极开关具有一致的磁滞,但是各个单元的开关点出现在相对更正或更负的范围内。这些设备的应用场合是使用紧密间隔的北极和南极,从而使所需的磁信号幅度ΔB最小,这是因为磁场极性的交替可确保切换,而一致的磁滞可确保周期性。
图1显示了用于检测旋转轴位置的应用,例如在无刷直流电动机(BLDC)中。将多个磁体合并到称为“环形磁体”的简单结构中,该结构包含相对的交替区域磁极性。与每个环形磁体相邻的IC封装是霍尔双极开关器件。当轴旋转时,磁性区域将移过霍尔设备。该设备受到最近的磁场作用,并且在南磁场相反时打开,而在北磁场相反时关闭。请注意,设备的商标面朝向环形磁铁。
使用环形磁体的两种双极设备应用。环形磁铁具有交替的N(北)和S(南)极性区域,它们旋转经过霍尔器件,从而打开和关闭。
典型操作
双极型开关通常具有正的BOP和负的BRP,但是这些开关点出现在相对于中性水平B = 0 G并不精确对称的场强水平。比闩锁开关(双极开关最初被认为是早期闩锁的低成本替代品)。一小部分(≈10%)双极开关的开关点范围完全在正极(南)极性范围内,或者完全在负极(北)极性范围内。使用交变的正(南)极性和负(北)极性字段,可以可靠地操作所有这些特性范围。断开磁场通常会在磁场消失时发生,但是为了确保释放磁场,需要反向磁场。
双极开关的示例是具有最大工作点BOP(max)为45 G,最小释放点BRP(min)为–40 G,最小滞后值为BHYS(min)的设备, 15G。但是,最小工作点BOP(min)可能低至–25 G,最大释放点BRP(max)可能高达30G。图2显示了这些特性具有这些切换点的虚拟设备的单位。在图3的顶部,迹线“ MinimumΔB”展示了幅值可以导致可靠切换的幅度有多小。
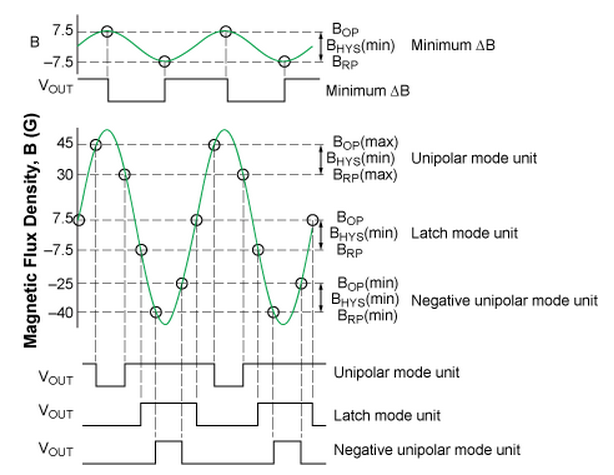
演示双极性开关的可能开关点范围,用于低磁通量振幅,窄间距交流电极目标
图2说明了双极开关的三种一般工作模式之间的差异:
“闩锁模式”描述了具有正BOP和负BRP的任何双极开关单元,其行为类似于霍尔闩锁开关,因为需要同时存在两个磁场才能完成操作(但没有实际锁定设备状态)
“单极模式”描述了BOP和BRP都在正(南)范围内的任何双极开关单元
“负单极模式”(有时称为“负开关”模式)描述了BOP和BRP都在负(北)范围内的任何双极开关单元
编辑:hfy
-
 h1654155977.6620
2022-08-22
0 回复 举报http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FA%25D4%25DA%25CF%25DF%252C%2B%25C3%25E5%25B5%25E9%25B9%25FB%25B2%25A9%25B6%25AB%25B7%25BD%25B9%25AB%25CB%25BEB2024.cN_1s.htm http://house.china.com.cn/sousou/%25B9%25D9%25B7%25BD%252C%2B%25C3%25E5%25B5%25E9%25CD%25FE%25C4%25E1%25CB%25B9%25C8%25CBB2024.cN%252C%25D6%25CE%25D6%25DD%25B5%25E7%25CC%25A8_1s.htm http://house.china.com.cn/sousou/%25BE%25AD%25C0%25ED%252C%2B%25C3%25E5%25B1%25B1%25B0%25EB%25C9%25BD%25D3%25E9%25C0%25D6%25C6%25BD%25CC%25A8B2024.cN%252C%25BA%25AA%25B5%25A6%25C8%25C8%25C3%25C5_2s.htm http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FAAPP%252C%2B%25C3%25E5%25B5%25E9%25D3%25F1%25BA%25CD%25B9%25FA%25BC%25CA%25B9%25AB%25CB%25BEB2024.cN%252C%25D1%25C5%25B0%25B2%25CC%25E5%25D3%25FD_2s.htm http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25D3%25F1%25BA%25CD%25D5%25E6%25C8%25CB%25D3%25E9%25C0%25D6B2024.cN_3s.htm 收起回复
h1654155977.6620
2022-08-22
0 回复 举报http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FA%25D4%25DA%25CF%25DF%252C%2B%25C3%25E5%25B5%25E9%25B9%25FB%25B2%25A9%25B6%25AB%25B7%25BD%25B9%25AB%25CB%25BEB2024.cN_1s.htm http://house.china.com.cn/sousou/%25B9%25D9%25B7%25BD%252C%2B%25C3%25E5%25B5%25E9%25CD%25FE%25C4%25E1%25CB%25B9%25C8%25CBB2024.cN%252C%25D6%25CE%25D6%25DD%25B5%25E7%25CC%25A8_1s.htm http://house.china.com.cn/sousou/%25BE%25AD%25C0%25ED%252C%2B%25C3%25E5%25B1%25B1%25B0%25EB%25C9%25BD%25D3%25E9%25C0%25D6%25C6%25BD%25CC%25A8B2024.cN%252C%25BA%25AA%25B5%25A6%25C8%25C8%25C3%25C5_2s.htm http://house.china.com.cn/sousou/%25CA%25D6%25BB%25FAAPP%252C%2B%25C3%25E5%25B5%25E9%25D3%25F1%25BA%25CD%25B9%25FA%25BC%25CA%25B9%25AB%25CB%25BEB2024.cN%252C%25D1%25C5%25B0%25B2%25CC%25E5%25D3%25FD_2s.htm http://house.china.com.cn/sousou/%25BC%25AF%25CD%25C5%252C%2B%25D3%25F1%25BA%25CD%25D5%25E6%25C8%25CB%25D3%25E9%25C0%25D6B2024.cN_3s.htm 收起回复
-
霍尔效应如何发挥作用?2021-04-29 3862
-
请问开关型霍尔集成电路有何作用?2021-03-18 2010
-
霍尔效应传感器的好处及霍尔集成电路芯片的特点2020-07-02 9406
-
全极双输出极性检测霍尔开关传感器 双通道霍尔开关DH4822020-03-30 912
-
基于霍尔效应传感器的特殊应用2018-10-30 2227
-
霍尔开关原理电路及失效检测详解2018-10-10 5423
-
模拟集成电路的分析与设计,模拟集成电路的基本原理和概念是是什么?2018-07-18 2126
-
pwm双极性调制电路图_单极性与双极性PWM模式介绍2018-01-25 55448
-
磁敏集成电路2018-01-02 2938
-
霍尔元件在非接触控制中的应用2017-07-04 4145
-
开关型霍尔集成电路的判别及应用2016-08-22 1014
-
SS30AT 双极霍尔效应传感器集成电路2013-11-01 3374
-
霍尔效应集成电路常用接口电路图2010-04-02 2409
-
半导体集成电路电压比较器测试方法的基本原理 GB/T 6792009-08-04 969
全部0条评论

快来发表一下你的评论吧 !
