

码相机设计中的图像传感器噪声源
描述
如今,电荷耦合器件(CCD)数码相机无处不在,但是很难设计出一种高性能的相机,无论用户在何时何地使用它都可以使用。优化数码相机的设计不仅需要了解如何将相机连接到系统,还需要了解可能降低相机捕获清晰图像的能力的噪声源。
在良好的数码相机设计中,系统的噪声性能受CCD的限制,而不是受其连接的系统的限制。通常,噪声有两种主要类型:时间噪声和空间噪声。时间噪声通常在很短的持续时间内仅限于单个像素,并且可以通过平均技术来缓解。空间噪声在更大范围内是常见的,并且可以通过帧减法或增益/偏移校正技术来消除其中的一些噪声。
时间噪声有五个主要来源:
- 散粒噪声:散粒噪声受泊松统计量控制,并且与到达传感器的光子数量成正比。它是自然边界,可建立最小可能的本底噪声和信噪比。
- 复位噪声:CCD通常使用感测电容器和源跟随器电路将带电的像素转换为电信号。复位噪声可应对感测电容器基准电压的变化,并且通常使用相关双采样器电路(可测量复位电压与信号电压之差)来消除噪声。然后将信号调整相应的量,从而消除此噪声源。
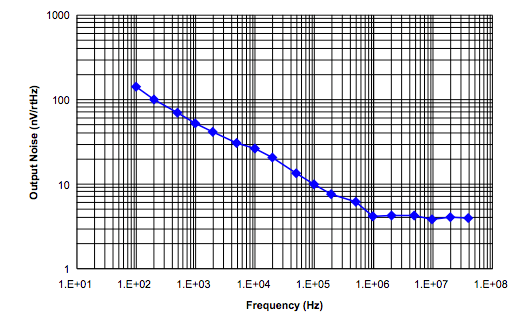
- 输出放大器噪声:这有两种形式-白噪声和闪烁噪声。白噪声与频率无关,并且是由源极跟随器FET中的热阻引起的。白噪声受电路灵敏度和放大器增益的影响。白噪声通常随放大器面积的增加而增加。
闪烁噪声与像素采样率成反比,并且与流过放大器MOSFET的硅氧化物界面的电流效率有关。噪声功率每增加十倍频次便降低10倍,直到噪声趋于平稳为止。对于缓慢采样像素(约1MHz采样率)的CCD,闪烁噪声通常决定本底噪声。闪烁噪声通常随放大器面积而减小。
设计以给定频率工作的源跟随放大器时,目标是在竞争的传感器几何结构之间找到最低的噪声折衷。
- 时钟噪声:时钟噪声是由时钟的切换波形产生的,这些时钟是通过CCD传输信号并处理电路输出所必需的。时钟噪声通常与时钟频率的平方根成正比。
- 暗电流散粒噪声:暗电流散粒噪声无法消除,并且等于暗信号的平方根。可以通过冷却CCD传感器来解决,这可以减少暗电流的总量。有关暗电流噪声的说明,请参见下文。
空间噪声的主要来源包括:
- 暗电流不均匀。暗电流中的不均匀性可以通过从每个图像中减去暗参考帧来校准。此过程可校正过程变化,硅中的缺陷以及金属杂质,这些杂质会在传感器的不同区域产生不同数量的暗电流。
- 光响应非均匀性(PRNU)。这种噪声是由工艺变化引起的,表现为对平场图像的光敏度变化的“棋盘”图案。它通常是平均信号的百分之一到百分之二,并且与平均信号呈线性关系。可以校准PRNU –尽管散粒噪声的增加成本是√2。
暗电流的解释:暗电流噪声是传感器耗尽的大块硅中或硅-二氧化硅界面处产生的热噪声。它是由具有足够热能进入中间状态并随后发射到导带中的电子产生的。硅-二氧化硅层上产生的暗电流噪声(表面暗电流)可以通过累积模式时钟来缓解,该模式会产生空穴的反型层,该空穴反型层可以有效地收集热激发的表面电子。体硅中产生的噪声为体暗电流,主要由硅中的缺陷引起。如上所述,减去暗参考系是校正整体暗电流变化的最佳方法。
一旦设计并制造了相机,就可以通过生成光子传递曲线来对其进行表征。这给出了有关传感器的完整阱和转换常数的信息,并用于导出系统的动态范围。此外,曲线还显示了相机的读取噪底,限制了相机受到散粒噪声的动态范围以及限制了图案噪声的范围。
编辑:hfy
-
科学相机噪声源介绍2024-03-14 1568
-
Vivado HLS的图像传感器FPN噪声去除算法设计2024-01-02 3288
-
CCD图像传感器和CMOS图像传感器的区别详解2023-10-11 3673
-
光电探测器的主要噪声源及其成因2023-09-19 6904
-
数码相机图像传感器,仍是索尼的天下2022-10-26 6562
-
MagnaChip胶囊相机专用CMOS图像传感器2018-12-03 2666
-
Micron CMOS图像传感器2018-11-20 2225
-
赛普拉斯900万像素CMOS图像传感器面向高端相机2018-10-24 3535
-
【下载】《数码相机中的图像传感器和信号处理》——图像传感技术领域经典著作2017-06-26 149809
-
CCD和CMOS图像传感器的比较2015-09-06 15495
-
传感器的噪声及其抑制方法2011-08-08 10530
-
科学级CCD相机的降噪技术研究2009-12-16 1197
-
CCD图像传感器及其数字相机技术2009-04-26 895
全部0条评论

快来发表一下你的评论吧 !
