

基于MLX90316器件执行角位置提取的输出电平后端校准
描述
本应用笔记描述了由MLX90316器件执行的角位置提取(弧形插值)之后的输出电平的后端校准。
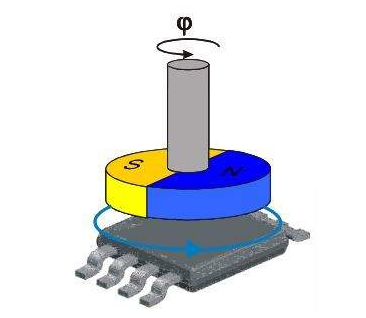
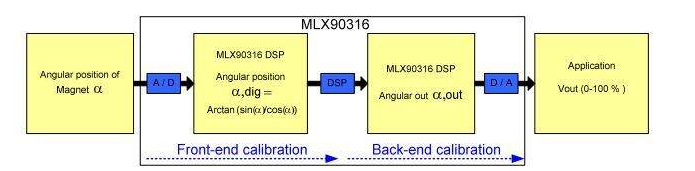
如图1和图2所示,如果磁体(径向磁化)在MLX90316上方旋转,则三轴霍尔板会提供两个正交信号余弦(α)和正弦(α)。参见MLX90316的前端校准应用笔记),将它们转换为角度αdig。=反正切(正弦/余弦)。
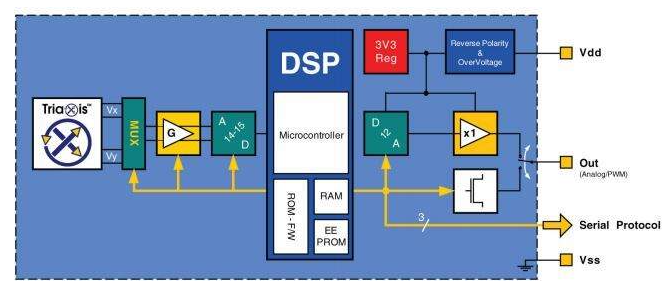
在DSP内进行进一步处理,以将计算出的α,dig转换为输出值α,out,包括对零位或不连续点,旋转方向和角度范围的补偿。
然后,将计算出的输出以数字形式作为PWM信号/与SPI兼容的串行接口给出,或者通过模拟输出信号进行模拟输出。
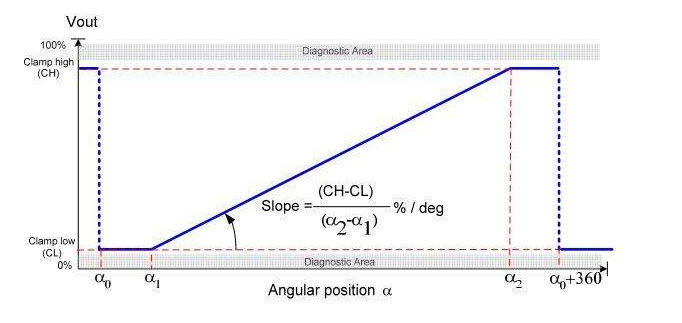
从图4可以看出,α1和α2之间的机械输入角度范围被线性转换为0-100%之间的输出水平。MLX90316具有一个EEPROM,用于存储与芯片功能和输出特性相关的所有必要参数(即α0,α1,α2,CH,CL,…),从而可以调整输出曲线特性。
后端校准:减少误差
失调,相位和幅度主要在IC级别上进行修整和补偿(请参见MLX90316前端校准的应用笔记),而理想情况下,可以通过补偿来补偿由于离轴,倾斜和磁误差引起的整体应用线性误差。输出传递特性的线性化。
结果
在补偿了点A,B的前端和后端误差之后,我们最终具有以下特征:选择DP点,以使夹紧下部区域和夹紧上部区域的大小相等(= 135度)注意:不包括噪声和热误差。
自动增益控制
为了获得最佳的信噪比,必须在磁体的磁通密度变化时调整增益。磁通密度的变化与气隙变化和温度变化有关。90316的微控制器将自动检查半径(= sqrt(sin ^ 2 + cos ^ 2)),如果半径不是ADC范围的90%,则更改增益。
放大器增益由两个增益级构成:粗增益和精增益。下图显示了16个粗增益x 64个细增益值和相应的可用磁场的所有可能组合。精细增益将主要补偿由温度变化引起的磁通密度的微小变化,而如果精细增益已达到极限,则粗增益以步长1增大或减小。
编辑:hfy
-
MLX90316使用求助2012-05-24 6970
-
MLX91206校准问题2013-08-29 7231
-
基于MLX90316的磁性角度传感器设计方案2018-11-06 3025
-
为什么MLX90316在静态的情况下老是跳动7个码值?2019-08-20 1453
-
有没有MLX90316 SPI使用程序2020-06-15 1691
-
TRL校准提取管芯S参数的技术2012-04-27 2784
-
基于MLX90316的磁性角度传感器的设计方案2013-12-03 22445
-
怎么样执行本地校准的MEMS?2018-07-11 3090
-
基于MLX90316绝度角度位置传感器板2019-04-29 18849
-
MLX90316 三轴旋转位置传感器的前端校准2021-06-21 9437
-
如何校准ATE引脚电子设备的电平设置DAC2022-08-10 2274
-
介绍一款自适应调整、数字输出的旋转位置齿轮传感器MLX902172022-10-19 2842
-
基于MLX90316的汽车油门踏板的设计与研究2023-11-10 465
-
Melexis推出高性能磁位置传感器芯片MLX904252025-02-28 1417
全部0条评论

快来发表一下你的评论吧 !
