

线性位置传感的角度传感器集成电路的感测方法解析
描述
本文介绍了有关设计过程的一些指导原则,该设计过程采用了旨在进行线性位置传感的角度传感器集成电路(IC),以及磁体的选择和方向,输出线性化,以及采用传感器IC阵列来扩大测量范围。还提供了许多磁体和感应长度的测试数据,以显示这些解决方案的理论精度和实际精度之间的匹配程度。
介绍
准确,低成本和非接触式线性位置感测通常使用条形磁铁和磁性传感器IC或传感器IC阵列来实现。磁铁附着在移动物体上,传感器的位置使磁铁滑动。看到的典型配置和磁场如图1所示。随着磁体在x方向上滑动,y方向上的磁场看起来像是一个正弦波,磁场与位置的关系在x = 0周围呈线性。
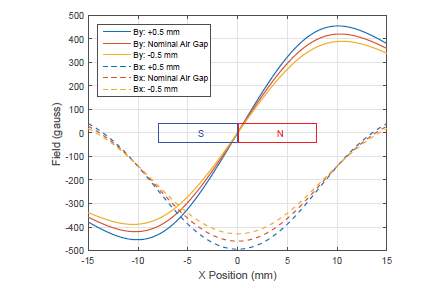
图1多个气隙的磁场与条形磁铁的位置的关系 磁铁的长度在所有图中均按比例绘制。
这种线性位置感测方法存在一些挑战,包括:
- 传感器IC和磁铁之间的气隙变化会导致测量错误。
- 磁场强度随温度变化会导致测量误差。
- 磁场与位置呈线性关系的测量范围被限制为磁体长度的50%左右,因此需要比被测行程长得多的磁体。
通过测量磁场角度与位置的关系,可以解决所有这三个问题。
- 在应用中看到的典型变化范围内,视场角与位置的关系相对于气隙几乎相同。图2显示,角度与位置相对于位置几乎是恒定的,尽管随着气隙公差变大,它的确发生了一些变化。
- 视场角与场强无关。
- 磁场角在大部分磁体长度上与位置呈线性关系,并且通过线性化,可以检测到磁体长度的150%或更大的行程长度。图3显示了在测量By(y方向上的磁场)的情况和测量磁场角的情况下,线性化为标称气隙后,误差与气隙在整个气隙上的位置的关系。使用By方法时,对于所示的16 mm磁体,只能感测10 mm的行程,精度为0.5 mm(气隙公差为±0.5 mm)。但是,使用角度法,对于相同的物理配置,可以检测到超过30 mm的行程,精度为±0.5 mm,基本上是线性检测范围的三倍。
Allegro A1335磁性角度传感器IC非常适合使用上述角度方法进行线性位置感测,因为它提供了超出精确角度测量范围的高级功能,例如:
- 角度测量的分段线性化。这允许补偿磁体末端附近的角度与位置曲线的非线性,从而将线性感测区域扩展到磁体边缘之外。这也允许将角度输出相对于位置的斜率调节至任何期望值。
- 可寻址的I2C / SPI / SENT: 这允许将阵列中的多个IC放在同一条总线上。
- 角度输出钳位: 此功能对于使用多个IC的系统很有用,因为钳位可用于帮助MCU识别哪些传感器IC超出范围,哪些应用于确定位置。
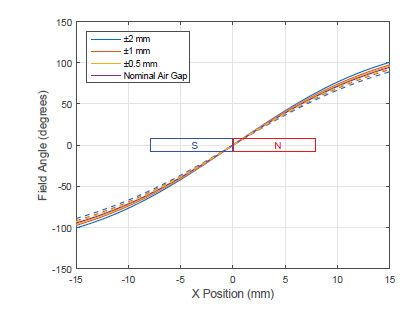
图2多个气隙的条形磁铁的磁场角与位置的关系。
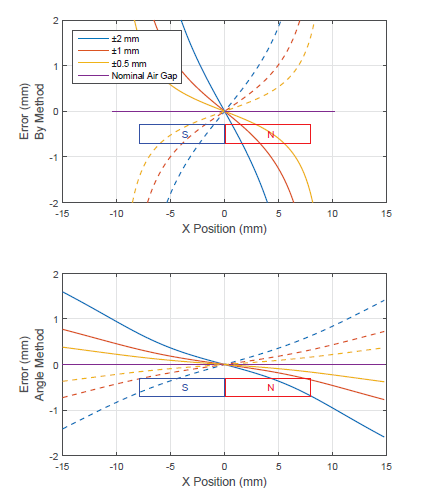
图3标称气隙线性化后,按场和角度感应的误差与位置的关系。
基本系统配置
A1335采用TSSOP-14封装(对于需要冗余的系统,则为双芯片TSSOP-24),并测量与封装平面内磁场的角度。这意味着对于线性位置感测,IC需要垂直于磁体运动定向,如图4所示。有效气隙是指从磁感测阵列(圆形垂直霍尔传感器)的中心到边缘的距离。的磁铁。CVH在A1335中偏离中心,因此可以根据需要使用它来帮助增加或减少系统中的气隙。
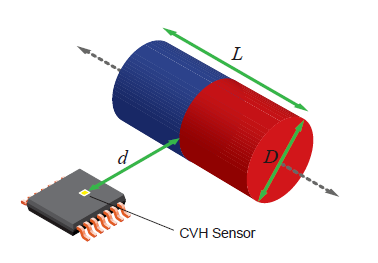
图4使用A1335的系统配置
设计用于线性传感的磁性系统
必须为要测量的行程长度选择合适的磁体尺寸和标称气隙,以创建具有所需精度的系统。主要,系统需要设计为:
- 磁角通常与位置成线性关系。
- 磁角相对于系统的气隙公差足够恒定。
- 磁场强度高于基于CVH的传感器IC所需的最小值,约为300高斯。
-
简单认识线性位置传感器2025-02-02 1903
-
使用位置传感器输出数据的角度计算方法2024-08-30 630
-
如何利用基于GMR的角度传感器设计用于汽车应用角度位置感测?2021-09-24 1320
-
浅谈A1332角度传感器集成电路中的高级片上线性化2021-04-29 3380
-
基于Allegro的A1335角度传感器集成电路片上线性化技术2021-04-27 3883
-
霍尔传感器定义2020-06-16 2809
-
常见的ADI传感器及信号调理电路:位置和运动传感器2018-10-26 2967
-
现代传感器集成电路:通用传感器电路2016-02-18 843
-
传感器集成电路手册2015-11-05 1256
-
磁位置传感器的应用2010-10-07 537
-
现代传感器集成电路 图像及磁传感器电路2009-12-22 28438
-
集成电路温度传感器电路图2009-04-13 7283
-
现代传感器集成电路2008-07-18 1068
全部0条评论

快来发表一下你的评论吧 !
