

双通道(正交)零差接收器的精确无线电高度仪设计
描述
这是我在MatjažVidmar网站上找到的一个简洁项目。该项目的目的是设计一个带有双通道(正交)零差接收器的精确无线电高度仪。在采用标准4.3GHz无线电高度表分配时,这一新设计提高了精度。新的无线电高度仪旨在用作小型通用航空飞机,实验飞机和无人机的着陆辅助设备,并配备了简单的合成语音人机界面。
航空无线电高度仪通常被设计为工作在4.2-4.4GHz频段的短程FM雷达[1]。它们的主要应用是仪表化进近和大型商用飞机的着陆。由于在4.3GHz频带中200MHz的可用带宽有限,航空高度计的精度和分辨率通常限制在几英尺。即使对于大型商用喷气飞机的自动着陆操作期间的耀斑,该精度也被认为是足够的。
大多数设计工作都用于开发高度可靠的无线电高度计,该高度计允许在同一架飞机上同时运行两个或三个仪器。尽管已投入大量精力开发单天线无线电高度仪,但大多数航空无线电高度仪都具有独立的发射和接收天线[2]。
无线电高度计在小型飞机上使用不多,因为小型飞机通常在视觉气象条件下运行。由于小型飞机的进场速度和着陆速度是大型喷气机的三至四倍,因此小型飞机的自动着陆需要相对更精确的高度计。当前的航空无线电高度仪不够精确,无法在小型飞机起火期间提供有用的信息。
然而,着陆不良无疑是导致小型飞机事故的第一大原因。他们的“周末”飞行员的技能几乎无法与商业航空公司的专业人员相提并论。夜间着陆,恶劣天气下的能见度差,大风和狂风,高压电缆等局部危险障碍物分散了飞行员的注意力,或者仅是疲倦的飞行员和长途旅行后生病的乘客,都可能导致飞机着陆不良。无论是滑翔机飞机紧急降落还是发动机故障后的紧急降落,都更加困难。在后一种情况下,飞行员在没有已知参考点的情况下估计其飞机在水(海)面或任何其他景观上的高度特别困难。
新型复合材料使飞机设计人员能够将空气动力学性能推向极限,从而最大程度地提高滑行率,燃油效率和/或航程。这些新飞机不再像图1所示的那样易于着陆。在所有这些情况下,精确的无线电高度仪可以解决许多问题,从而有效地防止了着陆事故和/或起落架的不必要磨损。
无线电高度计操作
无线电高度仪的工作原理在图2上进行了说明。航空无线电高度仪是短距离,低功率,连续波雷达,通常需要两个独立的发射和接收天线。无线电波的传播延迟通常太短,无法在发射器和接收器之间切换单个天线。
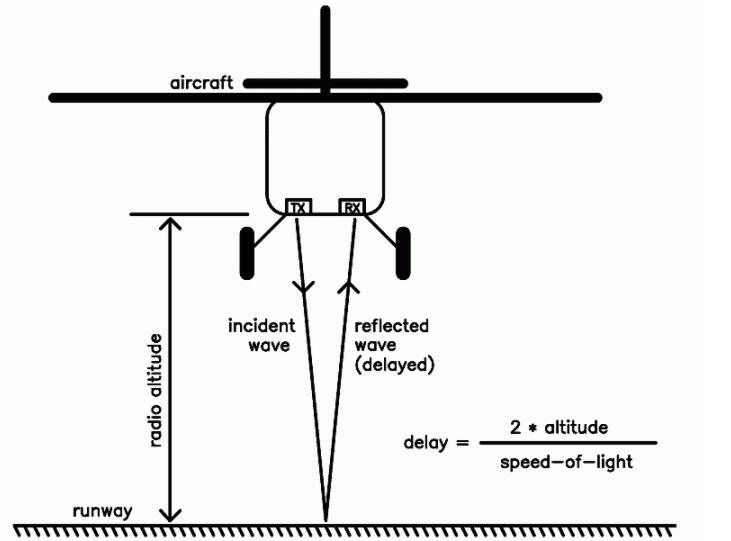
为了正确运行,无线电高度仪的接收天线应仅从跑道接收反射信号,并避免无线电信号直接来自发射天线。无线电高度计天线必须广泛分开,以避免两个天线之间发生不必要的串扰。尽管串扰的电子滤波允许设计单天线无线电高度计,但后者的操作通常限于指定的最低高度以上。
大多数航空无线电高度仪都是调频雷达。发射机的载波频率在给定的频率范围内连续扫描。由于接收信号被延迟,因此接收频率与发送器不同。如果发射器频率的变化率是恒定的,则延迟和高度因此直接与发射器和接收器之间测得的频率差成正比。
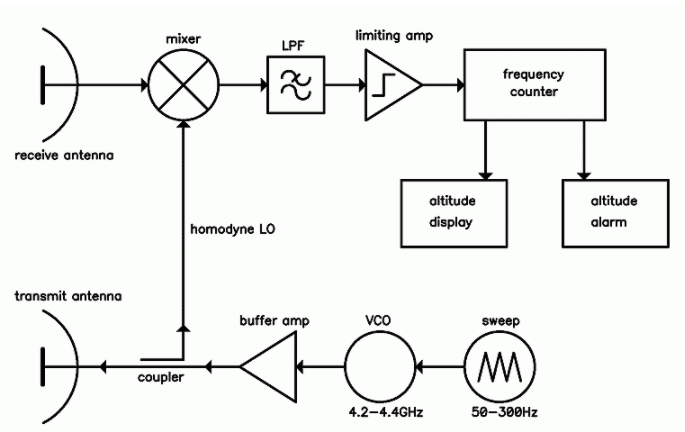
传统的FM无线电高度仪的设计如图3所示。扫描波形为三角形,两个斜率通常用于高度测量,以补偿由于飞机垂直速度而引起的多普勒频移。扫描频率通常在50Hz至300Hz之间。接收器的热噪声施加了较高的限制,下限是无线电高度仪消除飞机下降或爬升时多普勒频移的能力。
大多数航空无线电高度仪在4.2-4.4GHz频段内运行。在可用的200MHz中,通常仅使用大约150MHz的中央部分。4.3GHz(7cm)频段是可用带宽(测量精度)和跑道或其他反射目标的表面粗糙度之间的折衷方案。
发射器功率范围从10mW(+ 10dBm)到500mW(+ 27dBm)。发射和接收天线的方向性都被限制在大约10dBi,以允许无线电高度仪在飞机的适当俯仰角和倾斜角下运行。
接收器是零差设计,使用混频器来得出发射频率和接收频率之间的差异。拍频通常小于1MHz。发射器信号的一部分也用作接收器的本地振荡器。一些无线电高度计设计可能仅使用发射天线和接收天线之间的串扰在接收混频器中馈送LO信号。
拍频信号首先被滤波,然后被放大和限制。频率计数器可驱动高度指示器和各种高度警报(如果需要)。当然,必须从测得的高度中减去飞机的安装延迟(主要是将天线连接至无线电高度仪的电子设备的电缆)。
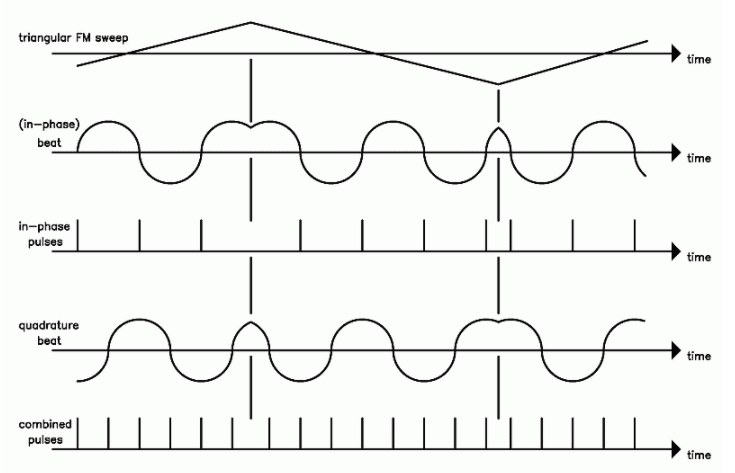
无线电高度仪的精度和分辨率受可用RF带宽的限制,如图4所示。对于给定的频率扫描,电子设备会产生一定的拍频,并具有可以计数的有限数量的跃迁。随着测得的高度变化,拍子模式会发生变化,并且计数器结果实际上会在两个相邻值之间产生几次振荡。
有多种方法可以提高无线电高度仪的精度和分辨率。最简单的解决方案是将频率扫描增加到[400]中所建议的400MHz。更好的解决方案是在主三角波扫描中添加一个低频(约10Hz)三角抖动波形。这样,在几次测量中,两个相邻值之间的振荡就被平均了,但是抖动需要一些额外的带宽!
在[4]中建议并在本文中描述的解决方案是正交添加第二个接收通道。这样,可用转换的数量就增加了一倍,并且精度和分辨率提高了两倍。此外,低频抖动幅度可以减半,从而减少了抖动的带宽浪费。最后,反正需要零差接收器的正交设计才能从接收到的信号中提取所有可用信息!
无线电高度计设计
开发并制造了带有双通道(正交)零差接收器的精确无线电高度仪。该无线电高度仪的主要应用是在小型飞机着陆期间帮助飞行员。图5给出了这种新设计的框图。
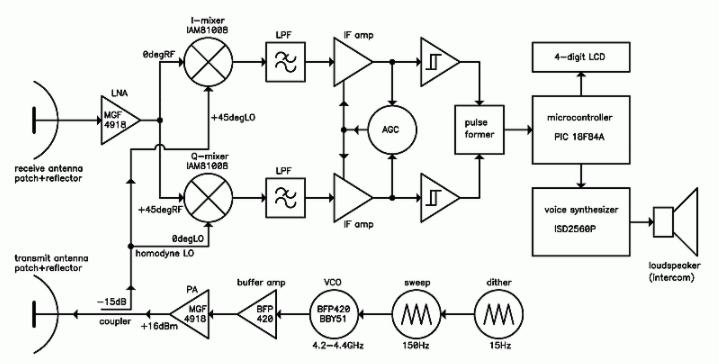
发送器调制器包括两个三角振荡器:150Hz的主扫描和15Hz的抖动。抖动幅度设置为主扫描幅度的大约10%。这两个波形的总和被直接施加到在4.3GHz下工作的微波VCO。VCO在反馈中包括一个BFP420放大器和一个叉指滤波器。由于扫描范围相对较窄,只有中央微带谐振器通过单个BBY51变容二极管进行调谐[5]。
VCO之后是两个放大器缓冲器级,使用另一个BFP420双极晶体管和MGF4918 HEMT。后者在4.3GHz时产生约40mW(+ 16dBm)的RF功率。该信号的大部分被馈送到发射天线,而一小部分(约一毫瓦)被耦合并通过低通滤波器发送,以提供零差本机振荡器。
接收器RF前端包括一个单级LNA,另一个MGF4918 HEMT和两个正交的IAM81008平衡混频器。RF和LO信号由两个Wilkinson混合器分离。使用不同长度的微带线来获得所需的相移。在此应用中,(现在已经过时的)IAM81008混频器的使用超出了其设计的频率范围,因此,接收器的总噪声系数在15…20dB的范围内。
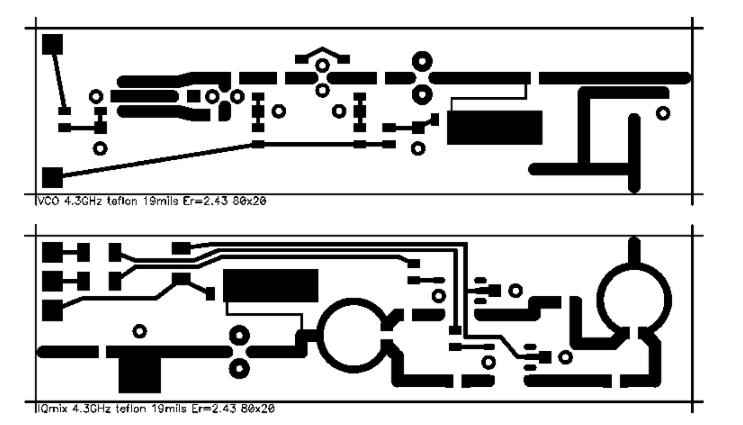
无线电高度仪的RF部分建立在两个采用微带技术的印刷电路板上(发射器和接收器)。每块板长80mm,宽20mm。这两块板均在介电常数为2.43的19密耳厚的“ Ultralam 2000”特氟龙层压板(罗杰斯)上进行蚀刻。这两块板的上侧均显示在图6中,而未蚀刻其下侧以充当微带接地层。这两块板都焊接在由薄黄铜板制成的框架中以进行屏蔽。
同相和正交差拍信号都经过滤波和放大。双通道放大器具有通用的AGC。必须谨慎选择AGC时间常数,以最大程度地减少由于反射不良而导致信号丢失的影响。两个施密特触发器级驱动一个脉冲形成器电路消除了噪声,该电路在两个输入信号中的任何一个信号的零交叉处产生一个输出脉冲。
脉冲被馈送到在8位PIC 16F84微处理器内部实现的频率计数器。计数器的门与主扫描或三角抖动都不同步。但是,微处理器对测量结果进行数字平均(滤波)。由于所涉及的频率相对较低,因此对于PIC 16F84而言,20MHz的时钟频率绰绰有余。
测量结果显示在4位数的LCD上:数百,数十和英尺单位,十进制表示四分之一英尺。微处理器还从LCD上删除了不必要的信息:十进制在10英尺以上被空白,单位和十进制在100英尺以上被空白。PIC 16F84的内部EEPROM存储了必须从测量结果中减去的飞机安装延迟的偏移量。
在小型飞机快速而关键的耀斑中,数字显示的用途有限。因此,无线电高度仪配备了围绕ISD2560P语音记录器芯片(模拟EEPORM存储)构建的语音合成器。ISD2560P包含21条预先录制的语音消息,实际上只占用了芯片总存储区域的不到一半。由PIC 16F84选择指示当前以英尺为单位的当前高度的实际消息,然后由ISD2560P播放该消息到扬声器,或者更好地播放到飞机上的对讲机。
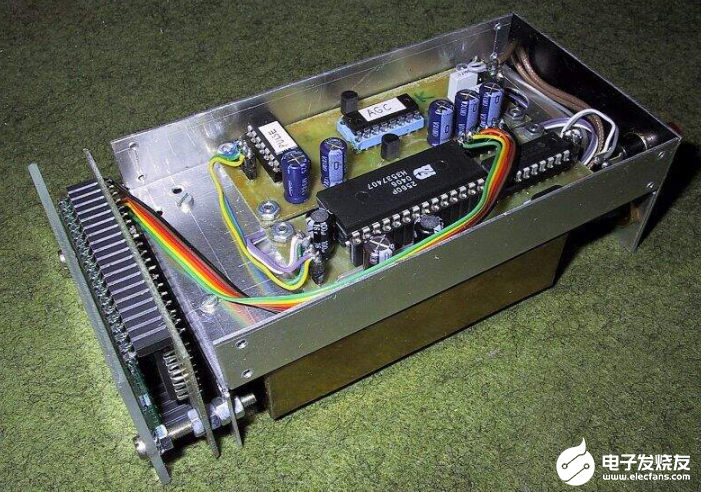
无线电高度仪原型的电子封装长140mm,宽66mm,高42mm,如图7和8所示。封装的横截面主要由前面板LCD的尺寸决定。调制器,发射器和接收器RF级位于底部,如图7所示。两个天线都使用SMA连接器,以保持重量和尺寸尽可能小,以代替常用的TNC。

如图8所示,双通道IF信号放大和处理,微处理器和语音合成器位于顶部。由于PIC 16F84和ISD2560P在实验期间必须重新编程几次,因此采用双列直插式封装这两款芯片中的一半都安装在原型的插槽中。当然,其余的大多数组件都是SMD,它们放置在单面印刷电路板的铜侧。
补偿飞机安装延迟的偏移量通过后面板上的单个按钮设置。快速按下此按钮仅会在LCD上显示EEPROM中存储的值。长按(超过6秒)实际上会将新值写入EEPROM,从而将显示设置为零。因此,该操作可在实际飞行之前方便地在地面上执行。
无线电高度仪通常安装在大型飞机上,机身由铝或碳纤维复合材料等导电材料制成。在这种情况下,相对容易在发射天线和接收天线之间获得良好的隔离。此外,无论飞机的实际类型如何,结果都是可以预测的。
不幸的是,许多小型飞机具有由织物,木材或玻璃纤维环氧树脂制成的不导电机身。另外,木材和玻璃纤维复合材料是小型飞机结构的一部分,因此,在不损害飞机结构强度的情况下,无法在机身上切开用于无线电高度计天线的大孔。另一方面,在带有透明机身的微波飞机上,内置天线是一种可行的解决方案。
一个成功的内部无线电高度计天线设计如图9所示。该天线包括一个线性极化贴片,其空气电介质安装在腔体内。选择正确的空腔尺寸会大大减少两个无线电高度仪天线之间的不必要耦合。腔周围的四分之一波长扼流圈进一步减小了耦合。当将天线放置在机身的玻璃纤维复合地板上时,空腔壁和阻流壁也可以用作实用的垫片。

图9所示的天线相对较容易用薄黄铜片制造。它在整个4.2-4.4GHz无线电高度带上实现了超过11dBi的增益和约15dB的阻抗匹配。当然,天线必须调整到实际的玻璃纤维机身厚度。
实际结果
所描述的包括天线的无线电高度计原型安装在机动滑翔机上(图1),在近两年的时间里,它在不同跑道和不同天气条件(不同土壤湿度)的数百个着陆场上进行了实际测试。当然,任何无线电高度仪的性能在很大程度上取决于土壤的反射率和粗糙度。
发现所描述的无线电高度仪在平均(草)表面上的最大工作距离约为1000英尺。在反射良好的表面(如静水)上,该范围要高得多,而在不利的条件下(树木)可能会下降到500英尺。这种设计的范围主要受到接收机相对较高的噪声系数和较低的发射机功率的限制。两者都可以使用更好的组件进行改进。由于该无线电高度仪主要用于在最后进近和小型飞机的耀斑期间运行的着陆辅助设备,因此认为500英尺的射程已足够。
无线电高度仪的精度主要取决于反射目标。始终可以在光滑,铺砌(混凝土)的跑道上获得可重复的结果。在草地跑道上,测量结果通常会偏离+/- 0.5英尺。这意味着在草跑道上并不是必须要进行抖动处理,因为草反射率的变化会产生类似的平均值。在不抖动的情况下,在标准4.2-4.4GHz频段的正交设计中,计数器的增量约为1英尺。不幸的是,在极少数情况下,草地跑道的反射率非常低,以至于无线电高度仪无法提供任何有意义的结果。
除了难以读取的数字高度显示外,因此在艰难着陆时使用受限,此外,在实际实验过程中还成功测试了简单的声学界面,如图10所示。
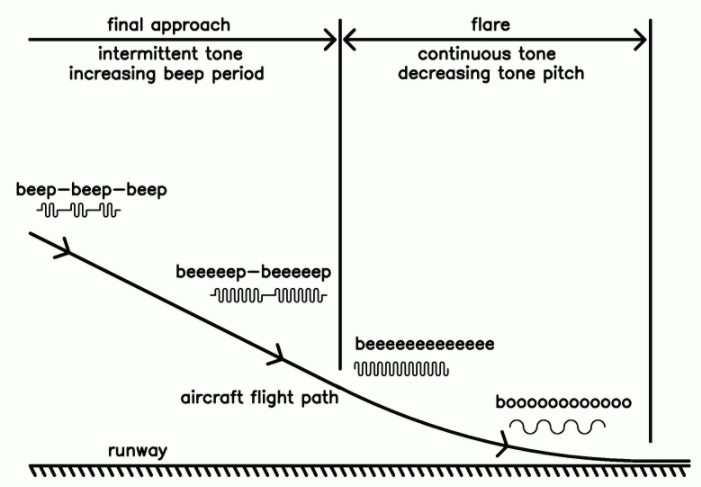
当声学信号是恒定音高和可变周期的间歇音调时,无线电高度仪将在最后进场的开始时打开。随着飞机下降到跑道,哔哔声周期增加。在耀斑开始时,提示音周期增加到无穷大,因此声音变成连续的声音。此后,通过减小的音调来中继高度信息。当起落架接触跑道时,音调降低到零。
尽管发现所述的声学接口非常快速可靠,在飞机的最关键配置中支持襟翼和/或扰流板完全展开的最终进近和火炬飞行,但飞行员也需要进行一些额外的培训。另一个缺点是,简单的声音信号很容易与飞机上其他仪器发出的哔哔声混淆。
因此,发现需要一种易于理解的语音合成器。实际上,发现足以用21个不同的词来描述飞机的高度,以英尺为单位:负,零,一半,一,二,三,四,五,七,十,十五,二十,三十,五十,七十,一一百,一百五十,两百,三百,四百和五百。在较高的海拔高度上,有意将分辨率提高了,以避免飞行员不必要的信息过载。
结论
实际的着陆无线电高度仪已在数百次着陆中开发,建造和测试。实际测试的结果表明,廉价的电子设备可以代替起落架的昂贵维护和/或修理和/或小型飞机上的其他损坏。
本文介绍的无线电高度计电路可以通过多种方式进行改进。更好的RF前端可以改善反射不良的表面的范围和可靠性。数字信号处理器可以完美消除两个天线之间的串扰,从而再次提高了仪器在反射不良的表面上的可靠性。最后,如果将两个正交差拍信号都馈送到信号处理器以测量相位,则无需进行抖动处理。
参考
[1] Werner Mansfeld:“ Funkortungs- und Funknavigationsanlagen”,1994年,HüthigBuch Verlag GmbH,海德堡,ISBN 3-7785-2202-7,第337-342页。
[2] Leo G. Maloratsky:“飞机单天线FM无线电高度计”,《微波杂志》,2003年5月,ISSN 0192-6225。
[3] Giorgos E. Stratakos,Paul Bougas和Kostas Gotsis:“低成本,高精度雷达高度计”,微波杂志,2000年2月,ISSN 0192-6225。
[4]MatjažVidmar:“设计提高了4.3 GHz无线电高度计的精度”,《微波与射频》,2005年6月,ISSN 0745-2993。
[5]MatjažVidmar:“宽带,变容二极管调谐微带VCO”,《微波杂志》,1999年6月,ISSN 0192-6225。
编辑:hfy
-
STWLC99 100W无线电源接收器技术解析与应用展望2025-10-22 1087
-
DS9637A双通道差分线路接收器数据表2024-07-11 626
-
DS90C402双通道低压差分信号(LVDS)接收器数据表2024-07-05 524
-
DS90LV028A LVDS双通道CMOS差分线路接收器数据表2024-07-03 467
-
设计数字无线电接收器的基础知识2023-06-09 3461
-
有源FM/AM/SW无线电接收天线电路2022-08-06 6969
-
软件无线电接收器的结构2022-08-04 3835
-
爱华无线电接收器FR-C90维修手册2021-05-27 1536
-
基于虚拟仪器的无线电高度表动态测试系统总体设计2020-11-25 1314
-
科学家研制出的全新无线电接收器DESHIMA2019-08-20 1498
-
点对点系统的常见无线电架构2018-10-29 1980
-
哈佛研究人员创造原子尺度最小无线电接收器2016-12-22 3720
-
简易无线电接收器电路2011-12-09 12807
全部0条评论

快来发表一下你的评论吧 !
