

采用STM32控制的大型车辆双向示警系统设计方案
描述
大型车辆由于自身车长,轴距长等特点在转弯过程中前轮与后轮轨迹不重合,形成“内轮差”区域。大型车辆发生的恶性交通事故中,由于“内轮差”引发的事故占70%以上。针对大型车辆转弯视觉盲区“内轮差”问题,本设计提出一套大型车辆内轮差危险区域双向示警系统的设计方案。整个系统模拟真实车辆转向过程。主控模块采用STM32进行控制,通过连接电路、实验调试后,该系统可以模拟真实车辆转向过程,并计算“内轮差”危险区域,进行相关双向声光示警,能够达到预期目标,对有效减少大型车辆“内轮差”事故的发生提供解决方案。
作者简介:张皓天(1998— ),硕士生,主要研究方向:先进控制和人工智能。

图1 内轮差区域示意图
1 系统总体设计方案
1.1 内轮差区域计算方法
建立车辆内轮差模型首先需要明确内轮差定义,内轮差是车辆转向过程中,前内轮转弯半径减去后内轮转弯半径的差值[5],而内轮差区域则是两轮转向过程中前内轮与后内轮不重合所形成的区域。内轮差的大小主要与以下三个因素有关。
● 车长:即整车的轴距,前轴与后轴的距离。
● 车宽:即前轴或后轴的轴间距。
● 转弯半径:由车辆转弯时所形成的前轮后轮不同的转弯半径。
给出计算车辆内轮差系统简化模型,并标明所需参数。l 为车长、前轮与后轮的轴距, d 为车身宽度,前轴轴间距,OC、OE、OB、OF分别为四个轮的转弯半径。未说明参数后续计算中会另作说明。汽车转向模型图如图2 所示。
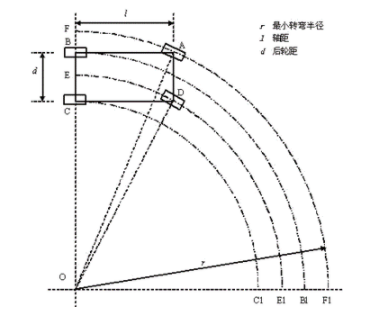
图2 汽车转向模型图
内轮差计算推导步骤如下:
1)根据内轮差的定义,内轮差m = OD −OC,所以需要OD 和OC 的数据。
2)△ OCD 是直角三角形, 根据勾股定理,OD2 = OC2+CD2,CD 就是汽车轴距l,所以需要OC的数据。
3) 从图中分析,OC = OB − BC,BC就是汽车后轮距d ,所以需要OB 的数据。
4) △ OAB 是直角三角形,根据勾股定理,OB2 = OA2 − AB2,所以需要OA和AB的数据。
5) OA就是汽车最小转弯半径r,而AB = CD,也就是汽车轴距l ,所以最大内轮差m可以计算得到。根据前面分析进行推导,过程如下:内轮差m 计算如式(1) 所示。
由公式可以看出,内轮差大小与车长(轴距)、车宽(同轴间距)、转弯半径(转向角)有关,三个因素均与内轮差的大小成正相关。
计算圆弧面积即可得出内轮差区域面积。
1.2 本系统设计方案
本设计包括STM32 单片机主控模块、角度信息反馈模块、超声波测距模块、声光报警模块以及辅助演示模块。声光报警模块又分为蜂鸣器模块和激光投射模块,辅助演示模块为红外循迹模块。整个系统模拟了真实车辆转向过程中内轮差区的检测与报警。在车辆转向过程中,角度信息反馈模块检测车辆转弯信息,主控模块经计算后控制舵机精确投射内轮差区域,距离信息测量模块提供内轮差区域内物体的距离信息,反馈给主控模块经判断后向声光报警模块发送执行信息,进行相关示警。总体的设计方案如图3 所示。
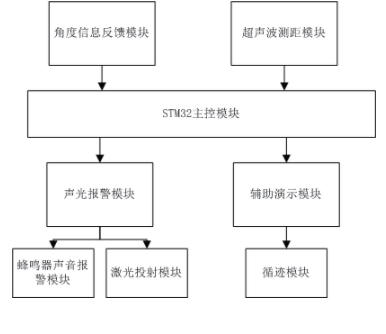
图3 系统方案图
2 系统硬件设计
硬件部分设计主要由STM32 主控模块、超声波测距模块、示警模块和辅助演示模块构成。
2.1 STM32主控模块
相对于大学阶段接触较多的51 系列芯片,STM32系列芯片引脚更多,功能更全面,也更便于开发,本次设计采用STM32F103RCT6 作为主控芯片,外部连接声光报警模块、超声波测控模块,并配置红外循迹模块。其引脚图如4 所示。
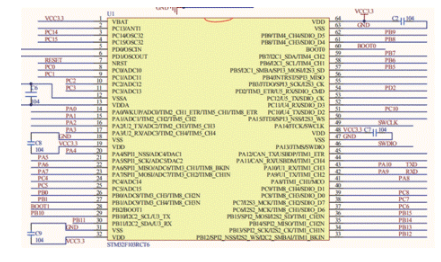
图4 STM32F103RCT6引脚图
主控模块控制外部连接声光报警模块、超声波测控模块,并配置红外循迹模块。
2.2 超声波测距模块
超声波测距传感器采用HC-RS04[6]。内部电路图如图5所示。
图5 超声波内部电路图图
超声波有四个引脚,分别为供电电压为5 V 的VCC电源引脚,GND 接地线,TR 触发控制信号输入,EC回响信号输出,其引脚电路图如图6 所示。

图6 超声波引脚电路图
超声波传感器能够实现测量距离作用的同时,也能够实现判断距离内是否有障碍物功能[7]。本设计中超声波测距传感器主要检测内轮差区域内是否有障碍物存在,若存在障碍物则将信息传递给主控模块,进行下一步声光报警系统。
2.3 示警模块
示警模块包括两部分:声音报警模块与激光投射模块,合称声光报警模块。
2.3.1 声音示警模块
声音示警模块采用简单蜂鸣器即可,此系统中其工作原理为主控芯片接收到超声波测距反馈信息,若判断有障碍物存在,则启动蜂鸣器驱动电路,进行声音示警功能。其电路图如图7 所示。
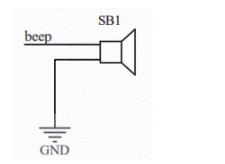
图7 蜂鸣器电路图
2.3.2 激光投射模块
经过选型比较,激光投射模块选择RUILIPU(瑞利普)激光雾灯,由主控模块进行控制,根据计算结果投射内轮差区域。激光投射模块实物效果图如图8 所示。
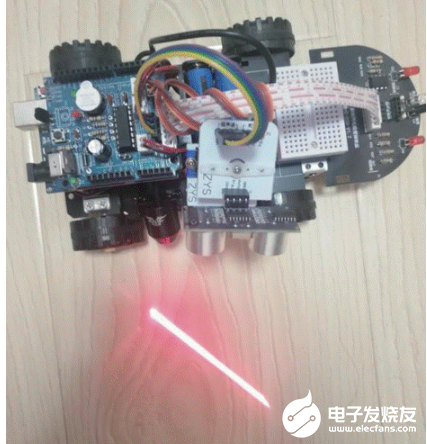
图8 激光投射模块实物效果图
2.4 辅助展示模块
辅助展示模块为红外循迹模块,作用为更好实现控制车辆转向角度。
为有效控制车辆转向角度,方便直观体现汽车转向过程中的内轮差区域,也为配合本系统设计要求,为模型小车设计了红外循迹模块功能。
红外传感器选择两个ST188,其采用高发射率红外光电二极管和高灵敏的光电晶体管组成。
其电路图如图9 所示。
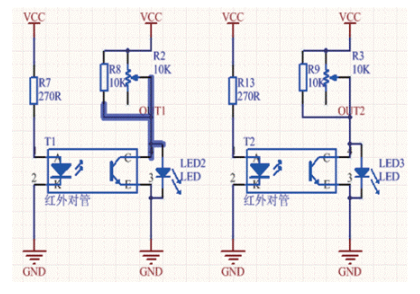
图9 循迹模块电路图
3 系统软件主程序设计
主程序程序设计是系统的整体软件思路设计,上电系统初始化,小车正常循迹,检测车辆是否转弯,检测到转弯则开始计算内轮差区域,将计算结果反馈给主控模块,主控模块向超声波模块发送指令检测内轮差内是否有障碍物,有障碍物则进行声光示警。没有则小车正常循迹,直至有转弯出现。主程序软件设计流程图如图10 所示。
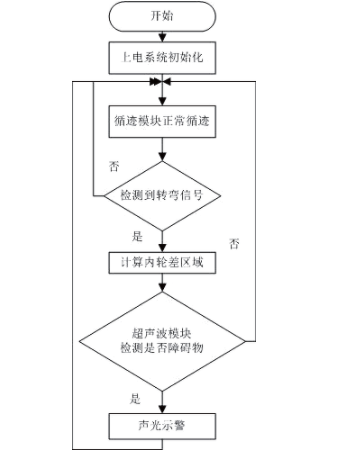
图10 主程序软件设计流程图
4 系统调试
4.1 硬件调试
本次硬件调试主要先对先各个部分分别进行功能调试,然后对整体进行调试。对内轮差区域有无物体分别进行调试、对循迹模块进行调试。循迹功能模块如图11所示。
内轮差有无物体调试图如图12 所示。
图11 循迹功能调试图
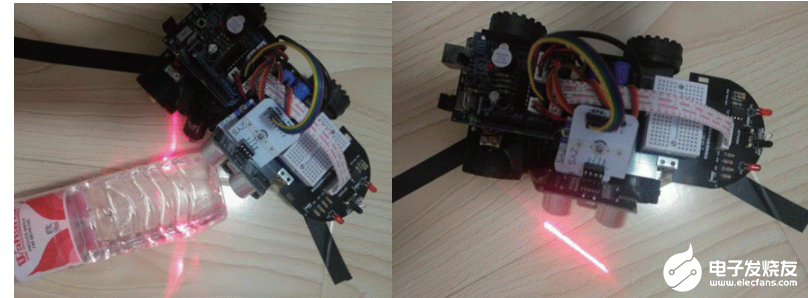
图12 内轮差区域有无物体调试图
4.2 软件调试
软件调试主要是对各个程序之间连接问题以及计算处理问题进行调试。将程序下载到微控制器里,配合硬件调试一同进行。结果显示软件程序部分没有问题。
5 结语
大型车辆交通事故频频发生,而由于内轮差造成的交通事故又占多数,针对大型车辆转弯视觉盲区“内轮差”问题,设计一套大型车辆内轮差危险区域双向示警系统。设计出能够模拟大型车辆转弯的模型实物,整个系统设计模拟真实车辆转向过程中内轮差区域的检测与示警。在车辆转向过程中,角度信息测量模块检测车辆转弯信息,主控模块采用STM32 进行控制,经计算后控制投射装置精确投射内轮差区域,距离信息测量模块提供内轮差区域内物体的距离信息,反馈给主控模块经判断后向声光报警模块发送执行信息,进行司机与行人双向示警。
通过方案设计、器件选型、硬件与软件的设计与调试,最终完成制作,实现了预期目标,能够针对车辆内轮差区域进行相关示警操作。检测到内轮差区域有障碍物时,声光同提示示司机与行人,为真实大型车辆减少内轮差事故提供解决方案。
编辑:hfy
-
选择双向转换器的控制方案2022-11-14 576
-
基于STM32的室内空气净化监测系统设计方案2022-04-29 3175
-
车辆超高检测示警系统解决方案2021-08-02 1499
-
基于STM32F407的励磁控制器设计方案2021-06-15 1138
-
基于STM32的设计方案(中)2018-09-05 2853
-
STM32设计方案与示例分享2018-09-03 3719
-
双向转换器控制方案的选择2017-04-06 3468
-
大型小区视频监控系统设计方案(光端机传输)——模板2017-01-04 858
-
基于STM32的EMS液晶显示触摸屏设计方案2015-11-09 780
-
基于STM32的12个设计方案(电机控制,LED,触摸屏,多路电...2014-03-25 99873
-
【资料分享】STM32设计方案与示例分享 第一波2014-03-12 11048
-
基于无线射频传输的大型车辆智能辅助倒车系统设计2013-09-18 1450
-
安防—GPS车辆监控系统设计方案2010-08-05 2953
-
人员与车辆信息管理系统设计方案2010-06-04 853
全部0条评论

快来发表一下你的评论吧 !
