

通过GaN组件解决激光雷达的技术局限性
描述
无人驾驶汽车现在正在成为现实。通过使用许多高性能的智能传感器,可以实现这种类型的应用。数字和微控制器领域的技术进步使得可以为ADAS(先进的驾驶辅助系统)创建传感器,例如车道保持,自适应巡航控制以及在超车期间检测盲点的结构。ADAS既是对驾驶员有用的工具,又是对更高安全标准要求的解决方案。关于ADAS的最重要的要素之一是行人探测系统的LiDAR,盲点检测和自适应巡航控制。通常,需要检测和映射车辆周围所有元素的所有应用程序。不难理解,激光雷达的设计对于获得安全的自动驾驶汽车至关重要。
什么是LiDAR以及如何工作
LiDAR代表光检测和测距,即通过光学波段中的电磁辐射进行(远程)检测和测量。该设备采用了RADAR的经典和简单原理,但是它确实使用了由激光脉冲组成的光束。用于计算射线源与任何物体之间的距离的技术称为TOF(飞行时间),如图1所示。与RADAR相比,光学设备即使在长距离下也具有更高的分辨率,并且因此,它能够获得要由中央单元处理的详细的三维图像,以避免碰撞。
图1:TOF技术(来源:www.hamamatsu.com)
LiDAR的原理已有数十年的历史,其应用涉及医疗,军事以及汽车等许多领域。但是使用激光束会带来一些重要的技术问题:如果一方面,激光被证明是一种高分辨率光源,它能够充分利用这一特性,并通过扫描精心地重建环境的形态;另一方面,需要较高的机械精度和大约纳秒级的脉冲速度。此外,尽管RADAR的电磁波具有高反射系数,但是对于激光而言却不能说这,因此需要系统所需的优异能量。由流过LED的高电流(甚至几十安培的数量级)产生,激光束和占空比必须一定是低摆的,以免过热。高脉冲速度和高能量会导致系统中的电子设备需要非常高的功率,而增加系统功率不可避免地导致以下技术挑战:
●电源组件的热管理和散热器的设计
●电路能效
●根据断裂温度找到合适的模块
●优化电路板布局以最大程度减少寄生元件
激光雷达内部:激光驱动器
LiDAR激光器由专门设计的电路驱动,能够在短时间内提供大量电流。适中的驱动器由一个与激光器串联的充当电流开关的组件组成。实现这种驱动器最常用的电路拓扑之一是电容器放电谐振电路,如图2所示。
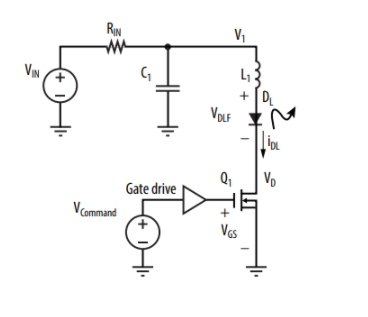
图2:电容器放电谐振电路(来源:epc-co.com)
Q1和DL分别是要激活的激光器的开关和LED。立即关闭控制,将C1电容器充电至VIN电压。当Q1接通时,C1通过DL和L1电感放电,从而形成谐振电路。因此,流过激光器的电流将是一个正弦脉冲IDL,直到LED两端的电压高于其正向电压VDLF为止。当DL上的电压小于VDLF时,C1再次开始充电。
这种简单电路的优点有很多:
●如果知道,可以利用寄生电感,
●传输到激光的能量与VIN直接相关
●只有一个易于控制的单端开关元件
●传输到激光器的脉冲的持续时间小于开关设备的控制接通时间。
面对现实时,电路的技术方面存在冲突。传统的硅组件(例如MOSFET)无法为有效的LiDAR系统中的激光驱动器实施提供必要的功能。MOSFET通道必须很大才能提供更高的控制能力,这会导致寄生电容的充电时间过长,从而导致开关频率对于应用而言太低。此外,热管理需要沉重且笨重的散热器才能充分发挥作用。
符合要求的GaN器件参数
通过使用硅组件来解决上述问题很复杂,并且需要经验丰富的工程师和设计师来从事电源和高频领域的工作。
当前的电子工程师可以使用创新的宽带隙技术设备,这些设备具有理想的特性,可以满足汽车领域对LiDAR系统的需求。
GaN(氮化镓)器件的电子迁移率是硅中的电子迁移率的数百倍,其能隙为3.4 eV。与硅同类产品相比,GaN MOSFET具有更低的传导损耗,更高的开关速度,更好的热性能以及更小的尺寸和成本。
所有这些功能都可以满足驱动器电路开关组件的需求。
图3:GaN器件的基本结构(来源:www.st.com)
结论
GaN组件在商业设备中的使用只是开始。几年前被认为是不可能或太复杂的技术解决方案在许多领域都被证明是成功的,例如在LiDAR系统的电源驱动器中。因此,可以肯定的是,在未来几年中,WBG器件将主导电力电子领域,这可以解决“旧”半导体器件的技术局限性。
编辑:hfy
-
34063的局限性2011-06-12 0
-
激光雷达分类以及应用2017-09-19 0
-
常见激光雷达种类2017-09-25 0
-
固态设计激光雷达2018-01-25 0
-
从光电技术角度解析自动驾驶激光雷达2018-09-10 0
-
AGV激光雷达SLAM定位导航技术2018-11-09 0
-
机器人和激光雷达都不可或缺2019-02-15 0
-
TOF激光雷达2019-06-07 0
-
激光雷达知多少:从技术上讲讲未来前景2020-07-14 0
-
激光雷达2021-01-17 0
-
运算放大器的精度局限性是什么2021-03-11 0
-
FMCW激光雷达与dTOF激光雷达的区别在哪?2021-07-23 0
-
WSN中LEACH协议局限性的分析与改进2021-09-15 601
-
Mobility LiDAR系列激光雷达突破固态激光雷达的局限2022-08-23 1520
-
WDM技术的缺点和局限性2024-08-09 861
全部0条评论

快来发表一下你的评论吧 !
