

永磁同步电机控制系列的数学模型(9):三闭环系统的控制原理
描述
1 什么是三闭环控制系统?
在双闭环(速度环和电流环)控制的基础上,在转速外环外再加一个位置外环,这个位置外环的主要作用是使得电机准确的跟随位置给定,所以又称为位置闭环系统。他的原理和双闭环系统相似,通过电机的目标位置和实际位置做差,得到的偏差量作为转速调节器的速度给定。位置偏差越大,相应的转速给定也越大。
跟双闭环控制系统最大的区别就是,三闭环主要解决的是使得电机转到哪的问题,而双闭环主要解决的是转多快的问题。
2 三闭环系统的控制原理和搭建
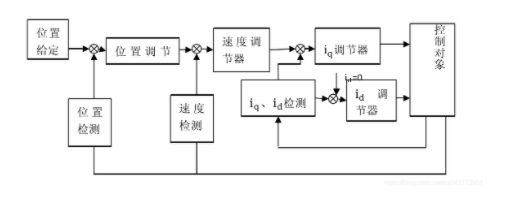
具体的结合原理框图进行介绍,如上图所示。在基础的双闭环控制的基础上,增加一个位置环,我们可以将双闭环看成一个速度控制模块,而位置调节器将给定位置信号和实际位置检测信号的差值整定为这个控制模块的速度给定,从而控制电机按照想要的速度和方向旋转,从而控制电机的位置。
举个例子会比较好理解:给定位置在350°,而实际位置在50°,想要电机旋转到目标位置角,就需要电机顺时针旋转300°。那么此时位置调节器就会输出控制电机正转的指令,速度环接受指令,进行顺时针旋转,到达目标位置后停止旋转。
3 位置环参数设计思路
第一步:双闭环参数设计。使得电机转速跟随性能优越,阶跃响应效果较好,且系统的快速性较好。如前文所述,三闭环的基础即为双环控制,一个好的位置控制系统,其双环控制的效果一定需要调节到最优值。
第二步:位置环参数设计。引入位置反馈量和位置调节器,使得仿真系统框图如第二节中框图原理一致,给定输入信号,并调节位置环参数。
1、信号给定:建议初始给定输入信号为斜坡信号,且斜率较小;
2、调节器设置:建议调节器设为纯P调节器,因为大部分位置控制是不允许超调存在的,且位置P调节器的初始参数可以设置稍微大一点,可以从500开始试验。
3、限幅值设置:建议将位置调节器的输出限幅值设为电机的额定转速(双闭环PI参数满足电机额定转速快速稳定跟随)。
4 实验结果
其实本质上就是在双闭环的基础上加了一个位置环,其实难度和结构都比较简单,但是要实现高的精度,还有很快的相应速度,如果纯PI需要特别理想的参数,或者就是增加前馈补偿,本次我只是尝试了调PI的方法。
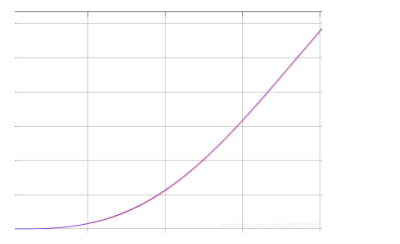
下图是转子位置给定和实际位置图(此时我的给定是一个凹形曲线),红色的是实际位置,蓝色的是给定。
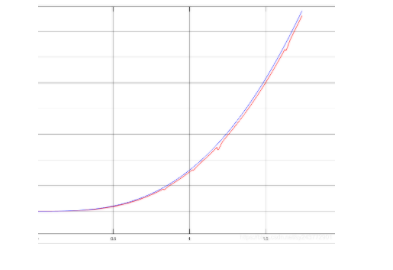
再看带载运行的情况,有小范围的波动,以上四次波动分别为 2N 4N 10N 15N,可以看出都能够快速回到给定位置。
小结:
1、三环位置控制的目标是电机转到哪里,而双环控制的目标是转多快,两者存在较大差异。
2、位置调节器将给定位置信号和实际位置检测信号的差值整定为这个控制模块的速度给定,从而控制电机按照想要的速度和方向旋转,从而控制电机的位置。
3、双环是位置控制重要的基础,进行位置控制之前,首要条件就是将双环系统性能调至最佳。
4、设计思路要明确
编辑:hfy
-
永磁同步电机的数学模型2023-03-14 1190
-
永磁同步电机的矢量控制策略(二)之数学模型2023-03-13 1430
-
永磁同步电机--数学模型2023-01-12 4903
-
永磁同步电机动态数学模型和常用公式总结2022-09-26 14593
-
永磁同步电机的矢量控制策略2021-08-27 1991
-
如何去搭建一种永磁同步电机的数学模型2021-08-02 2357
-
永磁同步电机矢量控制(两电平)浅谈数学模型2021-06-28 1400
-
永磁同步电机控制系列的数学模型(1)2021-03-22 8900
-
永磁同步电机双闭环转速控制模型2019-03-14 9919
-
永磁同步电机控制2017-11-02 5460
全部0条评论

快来发表一下你的评论吧 !
