

一文解析PID的积分抗饱和原理
描述
理想的PID算法往往不能满足实际使用中的很多场景,比如积分饱和的问题,因此需要在此基础上对积分器做抗饱和处理,积分anti windup的优化。这不,隆哥这次面试,直接挂在这么基础的知识点上,肠子悔青,在这里简单总结一下。
1、什么是积分饱和
积分饱和(Integral windup或integrator windup)是指PID控制器或是其他有积分器的控制器中可能会发生的一种现象。
这种现象往往发生在误差有大幅变化(例如大幅增加),积分器因为误差的大幅增加有很大的累计量,因为积分器的输出满足下式;
离散化形式表示为:
所以随着时间的增加,每次累积较大的误差 ,很容易造成积分饱和并产生较大的过冲,而且当误差变为负时,其过冲仍维持一段时间之后才恢复正常的情形。
2、实际的例子
这里举一个直流电机调速例子,先看下图;
隆哥设定了转速为 ,这里可以是100 rpm,但是由于某种原因电机一开始堵转了,所以反馈的转速 为0;
这时候仍然处于堵转状态,那偏差 就会一直处于很大的状态,积分器对偏差 进行累积,便迅速达到一个很大的值,导致PID的输出已经接近输出的 上限,导致最终输出的PWM的占空比很大;
此时,堵转忽然消失,但是前面提到PID的输出已经接近输出的 上限,因此电机转速也急剧上升,当 时, ,此时偏差都处于负数状态;
虽然误差变成负数,并且积分器开始累加负数,但是由于之前积分器累积的值已经很大,于是,PID依然会保持较大的输出一段时间,从而产生了很大的过冲;
通常会产生的输出如下图所示;
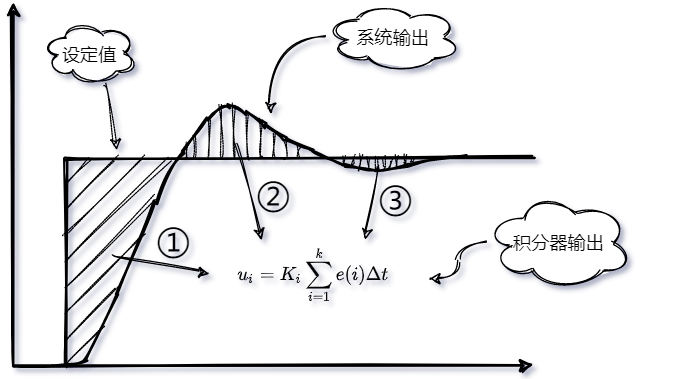
从图中我们不难发现,这里有三个过程;
过程①:因为这个过程存在 较大幅度变化的误差,因此积分器累积了较大的值,从图中可以看到,积分器的面积比较大(阴影部分);过程②:此时积分已经饱和,产生了较大的过冲,并且在较长的一段时间内,一直处于过冲的状态;过程③:积分脱离饱和状态,产生了积极的调节作用,消除静差,系统输出达到设定值;
3、负面影响
积分器的作用是消除系统稳态误差,如果出现积分饱和,往往会对系统造成负面的影响;
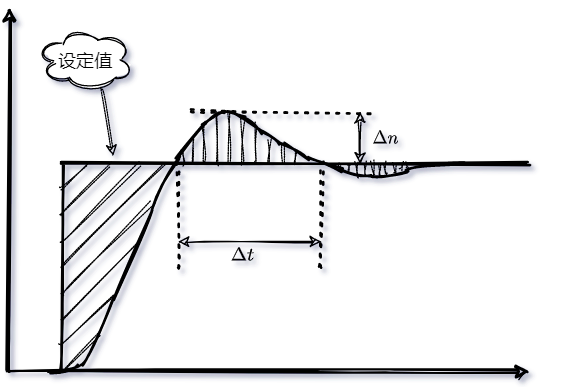
系统输出会产生较大的过冲(超调量);
如果产生正向饱和(图一所示)则系统对于反向的变化会偏慢;
系统产生了较大的过冲 ,并且较大的一段时间 都处于过冲的状态;具体如下图所示;
4、如何防止积分饱和
为了防止PID控制器出现积分饱和,需要在算法加入抗积分饱和(anti-integral windup)的算法;通常有以下几种措施;
积分分离或者称为去积分算法;
在饱和的时候将积分器的累计值初始化到一个比较理想的值;
若积分饱和因为目标值突然变化而产生,将目标值以适当斜率的斜坡变化可避免此情形;
将积分累计量限制上下限,避免积分累计量超过限制值;
如果 PID输出已经饱和,重新计算积分累计量,使输出恰好为合理的范围;
TI文档中的方法
下面是TI的位置式PI算法所做的改进,如下图所示;
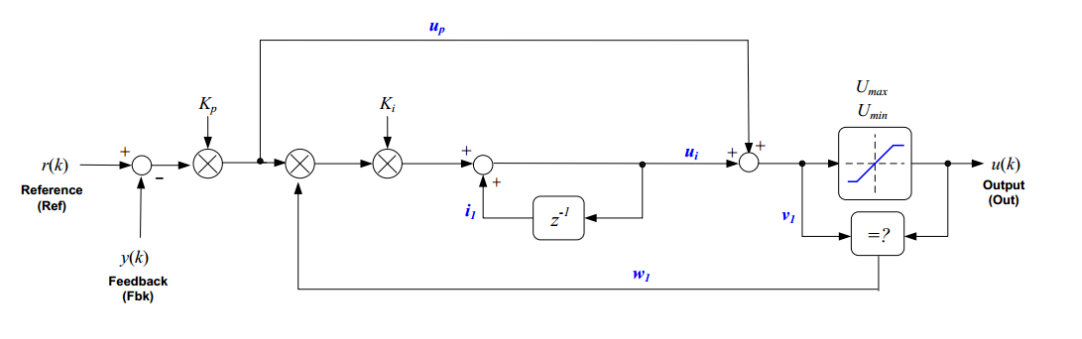
比例部分的输出:
积分部分的输出:
未做处理的PID输出:
最终PID输出 :
抗积分饱和用的系数
根据我的理解,由上述输出和①式可知,判断系统是否处于饱和的状态;
如果 ,说明积分器处于饱和状态,此时使 系数为0,这样防止积分进一步进行累积。
反计算抗饱和法
反计算Anti-Windup法,简称AW法,就是在输出限幅部分根据输入信号和输出信号的差值,把 作为反馈值输入到积分部分,从而达到抑制积分饱和现象的目的;
具体如下图所示;
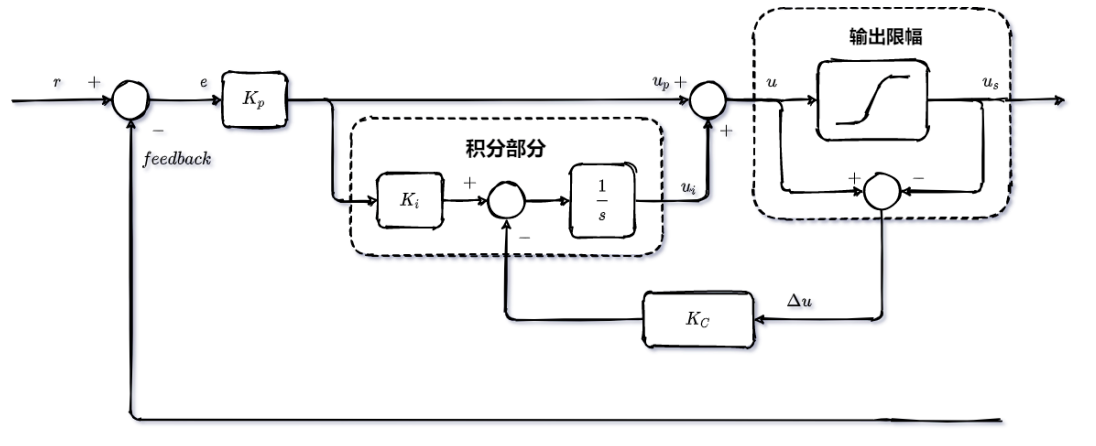
不难发现,在输出未饱和的情况下, 因此不会对积分器造成影响;当系统发生饱和时,则 ;
现在假设此时为正向饱和,则 ,那么 ,所以最终将 反馈到积分部分;那么从图中可知,相当于从 中减去了 ,这样可以削弱积分,让它退出饱和的状态;
关于 系数, 越大,积分器退出饱和的作用越强,反之则越弱;
当然,积分抗饱和的方法还有很多 遇限积分削弱法,遇限保留积分法 ,这只是其中的一种,下面给出TI的位置式PID算法,增量式的抗饱和处理也是类似的做法。
5、PID算法(抗饱和)
TI的算法中只实现了比例和积分,如果需要微分项,可以去除结尾部分的注释;
/* ===========
File name: PID_REG3.H (IQ version)
=*/ #ifndef __PIDREG3_H__ #define __PIDREG3_H__ typedef struct { _iq Ref;
// Input: Reference input _iq Fdb;
// Input: Feedback input _iq Err; // Variable: Error
_iq Kp; // Parameter: Proportional gain _iq Up; // Variable: Proportional output
_iq Ui; // Variable: Integral output _iq Ud; // Variable: Derivative output
_iq OutPreSat; // Variable: Pre-saturated output _iq OutMax; // Parameter: Maximum output
_iq OutMin; // Parameter: Minimum output _iq Out; // Output: PID output
_iq SatErr; // Variable: Saturated difference _iq Ki; // Parameter: Integral gain
_iq Kc; // Parameter: Integral correction gain _iq Kd; // Parameter: Derivative gain
_iq Up1; // History: Previous proportional output } PIDREG3;
typedef PIDREG3 *PIDREG3_handle;
/*-----------------------------------------------------------------------------
Default initalizer for the PIDREG3 object.
--*/ #define PIDREG3_DEFAULTS { 0, \
0, \
0, \
_IQ(1.3), \
0, \
0, \
0, \
0, \
_IQ(1), \
_IQ(-1), \
0, \
0, \
_IQ(0.02), \
_IQ(0.5), \
_IQ(1.05), \
0, \
}
/*------------------------------------------------------------------------------
PID Macro Definition
------------------------------------------------------------------------------*/
#define PID_MACRO(v) \
v.Err = v.Ref - v.Fdb; /* Compute the error */ \
v.Up= _IQmpy(v.Kp,v.Err); /* Compute the proportional output */ \
v.Ui= v.Ui + _IQmpy(v.Ki,v.Up) + _IQmpy(v.Kc,v.SatErr); /* Compute the integral output */ \
v.OutPreSat= v.Up + v.Ui; /* Compute the pre-saturated output */ \
v.Out = _IQsat(v.OutPreSat, v.OutMax, v.OutMin); /* Saturate the output */ \
v.SatErr = v.Out - v.OutPreSat; /* Compute the saturate difference */ \
v.Up1 = v.Up;
/* Update the previous proportional output */ #endif // __PIDREG3_H__ // Add the lines below if derivative output is needed following the integral update //
v.Ud = _IQmpy(v.Kd,(v.Up - v.Up1)); // v.OutPreSat = v.Up + v.Ui + v.Ud;
编辑:hfy
-
无刷直流电机抗饱和变结构PI控制研究2025-06-27 598
-
PID控制器开发笔记之三:抗积分饱和PID控制器的实现2018-05-05 5628
-
PID采样时间精准控制的相关资料分享2021-12-08 612
-
PID的相关资料下载2022-01-20 953
-
提供一个自己写好的PID模块2022-01-27 1533
-
数字PID控制的实现技术2010-10-20 504
-
温控系统中改进的PID算法2011-07-22 1041
-
基于变速积分的PID一级倒立摆研究2012-02-03 1084
-
抗积分饱和的PID算法控制地暖系统设计(DS18B20)2017-10-30 963
-
PID_REG32018-04-12 1414
-
五种控制器抗积分饱和的方法2020-07-10 17604
-
一文详细解析到底什么是积分饱和2021-04-05 26559
-
PID算法模块(含常用改进算法和例程)--C源码2021-12-03 835
-
一文彻底掌握微分、积分电路或PID控制思路2022-08-08 3056
-
一文了解透彻PID控制2023-05-19 5555
全部0条评论

快来发表一下你的评论吧 !
