

微机控制高速平缝机两个重要硬件系统的设计
电源设计应用
描述
微机控制高速平缝机两个重要硬件系统的设计
摘要:主要介绍了用于微机控制的高速平缝机的两个重要组成硬件的研制过程和工作原理。脚踏板控制器是用来控制电机转速以及给出缝纫机的开机和剪线信号,机头同步定位器是用来产生上下针位信号和机头感应信号,主要用在缝纫机的精确定位和电机转速的测试。
关键词:高速平缝机;脚踏板;机头同步器;霍尔传感器
0 引言
由针线、梭线两根缝线,通过机器的运动形成锁式线迹,将两层或多层缝料缝合在一起的工业缝纫机称为平缝机。它在缝纫业中用途最广泛,品种也很多,是缝制设备制造行业的主导产品之一,亦是缝纫行业使用量最大的设备之一,按速度分为低速、中速和高速平缝机。
但是,目前国内缝纫机厂家基本上是自己生产机械部分,而购买国外或者***等一些公司的控制器,然后再组装出售。这样就大大增加了成本,降低了利润。本文根据市场需求,设计了一种由196MC单片机和直流无刷电机组成的控制系统来控制高速平缝机。在缝纫机的研制过程中,除了主要的控制箱以外,还有两个重要的硬件系统,一个是脚踏控制器,另外一个是缝纫机机头同步定位器。
1 脚踏板控制器
由微机控制的高速平缝机要求电机在150~4500r/min范围内可调,并且能够实现自动停针位、拨线、剪线功能。当然,缝纫机作出这些动作都是要在操作人员的具体操作下完成的,脚踏板控制器在缝纫机系统中起的就是这种作用:作为电机的启动信号,速度给定信号以及剪线信号的发生控制器,下面具体分析其工作原理。
速度给定信号产生的基本原理是利用线性霍尔器件检测磁场的变化,反映脚踏板连杆上的磁铁的运动状况,再通过运放对该信号进行处理到
一定范围内(0~5V),提供给控制板上的单片机,以进行A/D转换,从而实现用脚踏板控制速度的大小。
霍尔电动势为
UH=KHICB= ICB(1)
ICB(1)
式中:KH为霍尔元件灵敏度;
IC为控制电流;
B为磁感应强度;
RH为霍尔系数,由材料决定,N型半导体RH=1/(nq),其中n为载流子浓度,q为电子电荷量;
d为霍尔元件厚度。
由式(1)可以看到,对于确定的霍尔器件,UH决定于控制电流IC和磁感应强度B。若保持IC不变,则UH就可以在一定的磁感应强度范围内随B线性变化,所以,关键问题就是使UH∝B。在给定的磁铁和外形尺寸下,本文选用以InSb为材料的线性霍尔传感器HW300B。其基本的资料可以参见HW300B的Data Sheet,这里仅给出其最基本的UH与B的线性曲线图,如图1所示。图1中Vc为控制端所加的电压,Ic为控制电流。
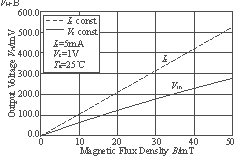
图1 HW300B的UH~B曲线图
脚踏板控制器除了给出速度给定信号外,还要给出开机和剪线信号,其基本原理是利用与脚踏板连杆相连的两块挡板在适当的位置遮挡光电对管的发射光,从而得到反映连杆位置的两个开关信号。
图2为开机和剪线信号产生的原理图,具有4个引脚的器件是光电对管,其脚2及脚4为发光二极管,脚1及脚3为输出三极管。当对管没有被遮挡时,输出三极管导通,脚3为低电平,外接的三极管截至,开关信号为高;当对管被遮挡时,输出三极管截至,脚3为高电平,外接的三极管导通,开关信号为低。这样,就可以实现所要求的功能。

图2 开机和剪线信号原理图
在具体的应用过程中,还有一个各信号配合使用的问题,也就是说,当脚踏连杆位置变化时,上述3个信号出现的时序问题,为了说明这个问题,我们先定义一个说明问题的方法,即连杆的运动我们用角度来度量,该角度定义为运动时连杆轴线与连杆静止时的轴线之间的夹角,向开机的方向运动称为正向,向剪线方向运动称为反向。
缝纫机对于这3个信号的要求是,当开机信号到来的时候,要求速度信号Vs不能超过0V,否则,进行A/D转换以后会超过缝纫机设定的最低转速,应该选择在低于0V为宜;开机以后速度随连杆角度的变化作线性变化,在接近角度最大值时达到运放最大饱和输出;当连杆反向运动过程中,先有剪线信号,然后再有开机信号;经过调节以后的各信号的测试曲线图如图3所示。横坐标就是连杆运动的角度,单位为度。对电路参数进行适当调节,就可以得到正常工作时的曲线。

图3 正常工作时脚踏板各信号配合波形
2 机头同步定位器与速度传感器
微机控制缝纫机的一个重要指标是停机位置的准确度,这里包括上针位和下针位的停机,所以,缝纫机在这两个位置必须各给出一个信号,单片机才可以通过检测这两个信号来控制电机停止。还有,如果要检测缝纫机的转速,可以通过机头的速度传感器来检测,这样,实际上机头同时具有上述两种功能。
上下针位信号的产生主要是依靠安装在机头上的两块极性相反的磁铁(跟着电机旋转),对两个相反安装的开关型霍尔传感器(固定)作用,即每块磁铁仅对应一个传感器起作用。当机头旋转到上针位或下针位位置上时,相应的开关霍尔传感器因为磁场到达其跳变的阈值,而产生输出跳变,也就是需要的开关信号。速度检测信号产生的基本原理是机头内包含一个环形空心铁环,其内环为一个均匀分布、互相咬合的24对齿槽,空心环内绕有线圈,则整个装置相当于一个24对极的感应电机,能够产生频率为转速24倍的输出感生电动势。
开关型霍尔传感器应用非常简单,仅按照典型接法即可。这里选用的是Allegro公司的U3144。外围电路仅须连接一个输入电阻与一个输出上拉电阻。图4为开关霍尔传感器的典型应用接法,图5为该器件典型的动作与释放磁感应强度曲线图。
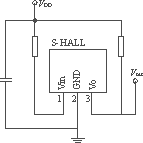
图4 开关霍尔传感器的典型应用接法
从图5可以看到,该器件在Vo~B曲线上存在一个迟滞,提供一个有一定脉宽的信号。上、下针位信号对应的传感器要互相相反地安装,因为相应的磁铁也是相反安装,则每个传感器在机头旋转一周仅动作一次。

图5 U314X动作与释放磁感应强度与温度关系曲线图
3 实验结果和总结
本文所介绍的两个硬件已经应用在微机控制的高速平缝机中了,而且性能良好,工作稳定,能够达到预先的要求。图6为脚踏板控制器的输出开机信号和速度控制给定信号。图7为上下针位的信号。
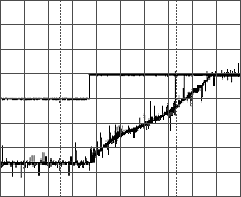
图6 开机信号和速度给定信号
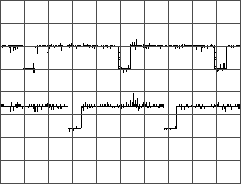
图7 上下针位信号
- 相关推荐
- 热点推荐
- 平缝机
-
电机微机控制系统可靠性分析2025-04-29 218
-
高速电脑平缝机伺服控制器201208MC_SWD2018-12-03 1922
-
基于微机保护控制接口装置实现CPLD抗干扰设计2019-04-25 1799
-
基于UML建模的智能平缝机控制系统2009-09-08 745
-
微机控制系统的干扰及抑制措施2010-08-03 658
-
采用VC++的制瓶机微机控制系统的串口通信2010-05-05 1007
-
两个基于单片机的液位控制系统设计介绍2018-01-16 9450
-
PROFIBUS协议在大直缝铣边机的电气控制系统中的应用研究2020-03-24 1548
-
如何控制两个电机直流2022-11-21 593
-
冷链运输中的两个重要环节2023-01-28 1684
-
两个LED和两个按钮的使用2023-01-30 581
-
两个单片机之间串口通信的例程2023-11-09 11445
-
两个硬盘2个系统开机切换2023-11-28 11776
全部0条评论

快来发表一下你的评论吧 !
