

TOF测距功能的原理以及使用方法的介绍
今日头条
描述
一、飞行时间测距法TOF(time-of-flight)测距方法
该方法属于双向测距技术,利用数据信号在一对收发机之间往返的飞行时间来测量两点间的距离。将发射端发出数据信号和接收到接收端应答信号的时间间隔记为Tt,接收端收到发射端的数据信号和发出应答信号的时间间隔记为Tr,如下图所示。信号在这对收发机之间的单向飞行时间Tf=(Tt-Tr)/2,则两点间的距离d=c*Tf,其中c表示电磁波传播速度。
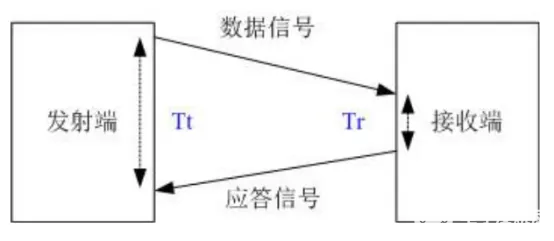
图1 time-of-flight测距方法
1、SX1280测距功能详解
SX1280的测距功能是基于测量一对SX1280收发机之间的往返飞行时间。这一过程使用了LoRa调制方案,使测距受益于LoRa所赋予的远距离和低功耗运行的所有优点。基本的测距操作如下图所示:
图2 SX1280测距原理
01一个SX1280承担主机角色,发送一个测距请求,启动一次测距。测距请求发送到另一个SX1280(必须配置为从机模式),从机随时接收传入的测距请求。在主机发送测距请求时,它自身还启动一个内部计时器,用作测距计时。
02从机接收到测距请求,它将同步处理传入的测距请求。从机不需要知道测距请求是在什么时候发送的,但是主机需要知道从机同步过程中处理的时间(在下面从机发送的测距响应中带有处理时间,在最后的距离计算中需要去除这一段处理时间)。主从机并不共享同一个计时器,而是分开独立计时的。
03最后,从机将经同步处理后的测距响应发送回主机,主机接收到测距响应后,从所经过的时间,即电磁波从主机传播到从机再传播回来所花费的时间,及同步处理时间,推断出飞行的往返时间,从而推断出距离。
2、SX1280测距过程中可能会造成测量误差的操作
如我们在上面中所看到的,测距过程主机生成一个内部计时器,用于对测距信号往返的飞行时间(TOF)进行计时。当从机对测距请求进行同步处理时,会产生已知的延迟(处理时间)。如果从机的时钟频率与主时钟的频率不同,那么计算时数据就会不准确,也就是会造成距离偏移。这种误差的来源称为频率误差
当测距信号通过数字和模拟信号处理和调制后传输时,通过无线电的发射和接收会产生一定的延迟(或距离)误差。通常,这种延迟可以被认为是必然的,这意味着在计算时需要对这种延迟给与一定的补偿。 另一个类似的测量误差来源是天线延迟,天线发射的信号(或接收到的信号)会有一定的延迟。此外,这种延迟可能不是均匀的,因为在一个辐射方向所产生的延迟可能会不同于另一个辐射
多路径是指发射信号从发射机到接收机经过多次反射和衍射的现象。当发射机和接收机之间存在障碍物时,这种影响会变得严重。综上所述,基于对各种误差源的划分,我们可以得出分为以下两种误差源: 1. 由各种特定延迟引起的固定偏差,我们需要给予特定补偿 2. 由一个未知的变量引起的偏差,主机和从机都要根据实际情况进行纠正
二、E28模块的测距定位应用
E28模块测距定位无需涉及到GPS定位技术,可以实现最小尺寸、最低功耗、最低成本。可以被应用到各个行业和领域,如仓库物流、畜牧业、建筑行业等。
1、畜牧业
目前畜牧业中,牛羊主要靠人工看管,人工投入成本大;牛羊无定位,每年存在不同程度的牛羊走失;部分用GPS+GPRS定位方案费用高、续航时间短。 将E28模块测距定位功能应用到畜牧业上,组成一个牛羊定位系统。该牛羊定位系统主要由E28定位模块、E28网关、牲畜管理平台组成。E28定位模块主要用于牛羊的佩戴,一一对应。几个E28网关便可以满足大型牧场的需求。E28定位模块定时向几个E28网关传输数据包,而E28网关向牲畜管理平台传输这些数据。牲畜管理平台通过算法处理分析这些数据,可以查看牛羊的具体位置、健康状态等。当牛羊生病时,工作人员可以及时赶到牛羊的位置进行处理、治疗等。
此定位方案成本低,功耗低(可电池供电),是非常理想的畜牧业动物定位方案。
2、仓库管理
现代仓库已成为企业的物流中心,其作用不仅是保管,更多是物资流转,因此如何运行现代技术,如信息技术、自动化技术来提高仓储运作的速度和效益是目前人们关注的一个焦点。在仓储作业中,叉车是货物搬运作业的主要工具,在作业时需要快速定位货物位置,快速回传作业信息。而叉车又可以与货仓组成智能仓储定位系统,实现叉车路径导航功能和叉车实时定位系统(货物定位)。
fqj
-
UWB 定位中的 ToF、TWR、TDoA 是什么?2026-04-08 525
-
激光测距仪的原理、使用方法以及日常维护2018-01-31 7806
-
如何用stm32f103开发板+激光测距模块tof10120实现激光测距?2021-03-10 4013
-
介绍示波器的特殊使用方法2021-05-06 2754
-
怎样去使用一种TOF Sense激光测距模块呢2021-12-15 3125
-
介绍SPI的使用方法2022-02-17 1174
-
XL5300TOF测距模块特点及其应用 全集成系统级封装模块2022-11-22 12113
-
XL5300TOF测距模块特点及其应用,全集成系统级封装模块2023-03-21 1787
-
AURORA的功能模块和使用方法介绍2017-09-22 1636
-
浅谈STM32CubeMX使用方法及功能介绍2020-03-25 13889
-
红外测距仪怎么用_红外测距仪使用方法2020-02-27 57337
-
TOF测距的主要优势_TOF测距的误差分析2020-09-17 6616
-
关于ToF的静噪对策和使用2021-05-07 2910
-
硅光电倍增管用于直接飞行时间测距应用(一):直接ToF测距系统的设计2023-12-07 1555
-
ESP32驱动TFmini-S红外激光测距ToF模块进行测距2026-03-06 536
全部0条评论

快来发表一下你的评论吧 !
