

什么是串级PID? 简单PID和串级PID的优劣对比
描述
什么是串级PID?
什么是串级PID?顾名思义就是两个串起来的PID,下面是一个双闭环的例子,外环是位置环,内环是速度环,最终的执行器是电机,电机输出产生了速度和位置;具体框图如下图所示;
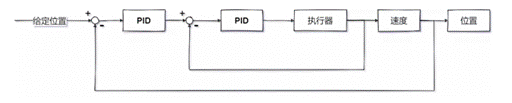
当然执行器也可以是四轴飞行器,整体过程如下:
我们在外环给定相应的位置高度,外环PID的输出就是内环PID的期望值;
内环PID的输出将产生相应的油门大小,最终飞行器会产生上升的速度;
内环反馈值为速度,控制相应的速度达到外环所需的速度期望值;
最终外环达到期望的位置;
可能这里比较抽象,好吧,下面继续细化一下硬件的细节;
PID的算法控制其实是一种无系统模型的控制,可以根据参数经验经验去调试系统;
但是实际的物理对象的模型其实早就确定好了,PID的输入量和输出量的物理意义也会因为实际的被控对象而改变;
换句话说,PID的输入基本上和系统的反馈量相关,而实际的反馈量是什么,从一开始就因为系统而确定下来了;
内环和外环
如果外环是因,那内环就是果。万物皆有因果。
比如伺服控制器的三环:
- 位置环
- 速度环
- 电流环
外环的变化会直接导致内环的变化,而内环是直接导致执行器变化的关键,如果这里依然使用飞行器作为例子,对于整个四轴飞行系统而言;
我们通过控制电机的电流,从而决定电机的输出扭矩;
扭矩和负载一起决定电机转速;
螺旋桨快速旋转从而产生了飞行器的升力,于是也决定了上升的速度;
最终也导致了飞行器的位置变化;
这是整个的控制过程。
如果只用单环的PID去控制系统,可以在给定系统期望的情况下达到所需要的位置吗?
答案是可以。
那这样串级PID还有什么意义吗?
答案是有。
我们试想一下,如果单纯使用单环PID去控制系统。
那我们看一下单环的PID系统框图;

我们设定了一个高度,并且希望飞行器达到预期位置高度,那么这时候系统的反馈值只有位置量;
那么飞行器是以什么样的速度去飞行?以什么样的加速度去启动?我们就无法去有效地控制飞行器的速度,让它去快速地到达期望的位置,具体位置曲线如下图所示;
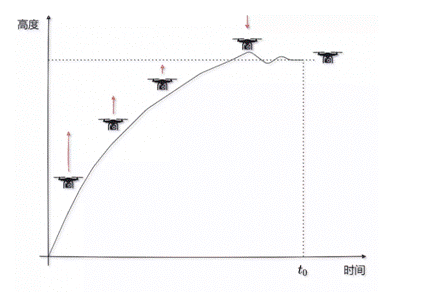
其实不难理解,因为一开始的高度差很大,所以PID计算输出的值就很大,因此初始速度会非常大,随着飞行器越来越接近期望位置,偏差越来越小,PID输出量逐渐减小,因此速度逐渐减小。
其实很多时候,PID只是底层,称之为内环PID,通过它可以先稳定某个系统,优化动态特性,然后在外层嵌套其他算法,当然,外面有好几层PID的控制系统是也很常见的。也就是我们介绍的串级PID的系统,具体如下所示;

控制器的本质是出入跟输出的函数映射关系。
其实从这个角度来看,通常PID适用于低阶的线性时不变系统,在此基础上限制到P,I,D三个系数。
整体还需要根据具体的系统,有所变化,有的系统其实只需要两个系数(比如PD或PI),甚至有的系统只需要一个就行(比如P)。因此上面系统中,外环只需要使用P环节就足够了,另外可以对速度曲线进行规划。
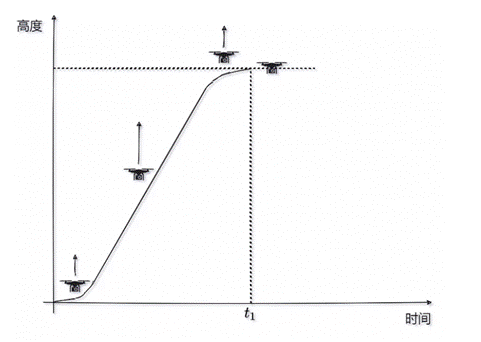
假设这里使用了速度曲线规划,因为可以对飞行器的速度进行控制了;
所以我们期望它尽快达到最大速度,因此从最开始的阶段进行匀加速,达到最大速度后开始匀速上升,即将到达期望位置的时候,进行匀减速,最终悬停到目标位置;
那么整体的位置变化曲线如下所示;
换句说话说,就是外环PID的输出作为内环PID的输入;
下面是单环PID的伪算法;
previous_error := 0 //上一次偏差
integral := 0 //积分和
//循环
//采样周期为dt
loop:
//setpoint 设定值
//measured_value 反馈值
error := setpoint − measured_value //计算得到偏差
integral := integral + error × dt //计算得到积分累加和
derivative := (error − previous_error) / dt //计算得到微分
output := Kp × error + Ki × integral + Kd × derivative //计算得到PID输出
previous_error := error //保存当前偏差为下一次采样时所需要的历史偏差
wait(dt) //等待下一次采用
goto loop
那么改成串级PID需要如何操作呢?
具体伪算法如下所示;
previous_error := 0 //上一次偏差
integral := 0 //积分和
previous_error_inner := 0 //内环PID上一次偏差
integral_inner := 0 //内环PID积分和
//循环
//采样周期为dt
loop:
//外环计算
//setpoint 外环设定值
//measured_value 外环反馈值
error := setpoint − measured_value //计算得到偏差
integral := integral + error × dt //计算得到积分累加和
derivative := (error − previous_error) / (n*dt) //计算得到微分
output := Kp × error + Ki × integral + Kd × derivative //计算得到PID输出
previous_error := error //保存当前偏差为下一次采样时所需要的历史偏差
setpoint_inner = output //外环的PID输出赋值给内环的PID输入
wait(n*dt) //等待下一次采样
goto loop
loop_inner:
//setpoint_inner 内环设定值
//measured_value_inner 内环反馈值
error_inner := setpoint_inner − measured_value_inner //计算得到偏差
integral_inner := integral_inner + error_inner × dt //计算得到积分累加和
derivative_inner := (error_inner − previous_error_inner) / dt //计算得到微分
//计算得到PID输出
output_inner := Kp_inner × error + Ki_inner × integral_inner + Kd_inner × derivative_inner
previous_error_inner := error_inner //保存当前偏差为下一次采样时所需要的历史偏差
wait(dt) //等待下一次采样
goto loop_inner
这里将内环PID的相关变量加了后缀 _inner,loop是外环PID进行周期控制,loop_inner是内环PID进行周期控制,两者相互独立,将外环PID的输出赋值给内环PID的输入即可;
遇到干扰的时候,内环控制器首先进行粗调,外环控制器再进一步细调。
因此控制效果必然优于单环的PID控制系统。
串级控制系统在结构上仅仅比简单控制系统多了一个内环回路,可是实践证明,对于相同的干扰,串级控制系统的控制质量是简单控制系统无法比拟的。
PID参数
串级PID的参数整定基本遵循从内到外,先整定内环PID的参数,再整定外环PID的参数;
根据经验法调试参数,通常来说先整定内环比例参数P,然后整定积分参数I,动态特性可以整理微分参数D,当然还需要对饱和的情况进行处理;
总之可以观察输入输出曲线;
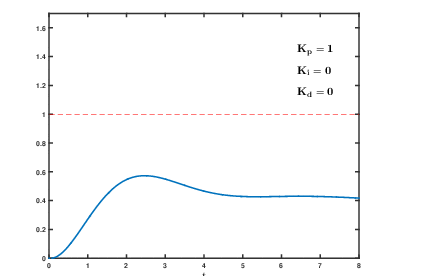
那到底什么样的响应曲线算好的呢?
一般来说并不存在最优的,比如有的对速度和加速度有限制,有的系统一定不能出现超调量等等,有的系统则是响应越快越好。所以还是那句话,我不要你觉得,我要我觉得,合适才是最好的。
总结
本文简单介绍了串级PID的相关概念,以四轴飞行器为例,对比了简单PID和串级PID的优劣;
编辑:hfy
-
串级控制pid参数怎么调节2024-08-23 7431
-
串级PID比单级PID区别在哪里?2023-10-16 825
-
串级PID的相关概念2022-07-03 2996
-
PID的串级控制来控制电机2022-01-10 2719
-
PID控制的原理是什么?如何去实现串级PID的源码呢2021-12-17 1993
-
到底什么是串级PID2021-03-17 2340
-
角度单环PID/串级PID的原理图2021-03-07 4727
-
实例分析:简单PID和串级PID的优劣2021-02-27 5590
-
一文详解PID串级控制?2020-10-22 2995
-
请问minifly的飞控PID程序里面是单级PID还是串级PID?2019-07-25 2677
-
串级PID2015-12-02 960
-
串级PID控制原理2010-04-28 15993
-
基于串级PID控制技术的堆垛机控制器的设计2009-08-29 799
全部0条评论

快来发表一下你的评论吧 !
