

关于5种RS485自动切换方向方案对比
描述
RS485 作为常见的总线之一,几乎每个工控设备都在用,我们也对其熟悉不过了。我们都知道 RS485 双半双工通信,其 CPU 内部的根源是串口通信,串口通信是区分发送 TX 和接收 RX 的,在同一对差分信号线上同时传输 TX、RX,就是进行方向的控制,方向的控制时机不对,数据传送是要出问题的。
例如下图 1、图 2 中,CPU 端的 TX 信号发送完毕后约 100uS 后方向引脚 拉低,切换到接收状态,但是在 TX 信号发送完毕后 60uS 从机就回复了的 RX 信号,由于此时还是处于 RS485 芯片还是处于发送状态,此时的接收数据将会被忽略,在系统层面就是体现为数据接收丢包。

图 1 RS485 接口电路
有些读者会可能回想,只要从机回复数据晚一些,不要这么快速回复,就不存在这个问题了。但是从机一般都是客户的机器,我们几乎不可能要求别人更改回复时间。例如三菱的 Fx3U PLC 作为从机时,从主机发送数据结束到从机回复数据,只用了 60uS,部分控制板,甚至回复时间在 10uS 以内。
研究 RS485 的方向切换的目标就是:RS485 总线空闲时要处于接收状态,如果有主机发送数据,则置高方向引脚,发送完成及时切换到接收状态。
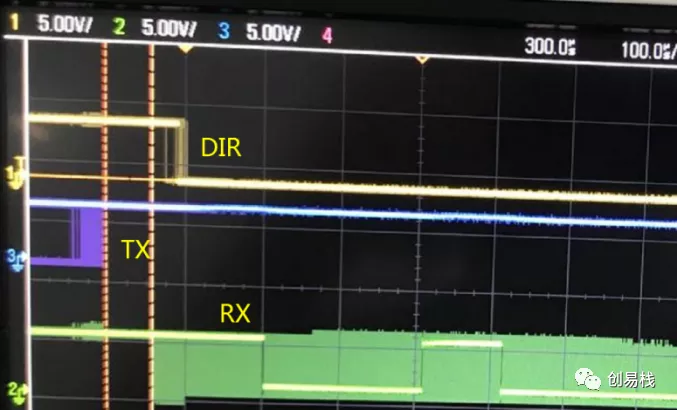
图 2 方向脚切换时间过长的情形
一、RS485 方向切换的方案 1:使用反相器自动切换
大部分的低成本 RS232-RS485 转换器采用了这种方法。具体的实现方法是:把串口的发送信号 TX 作为反相器的输入,反相器的输出则用来控制 RS485 收发器的收发控制引脚,同时在 RS485 收发器的 A/B 输出端加上上拉 / 下拉电阻,具体电路如图 3 所示。
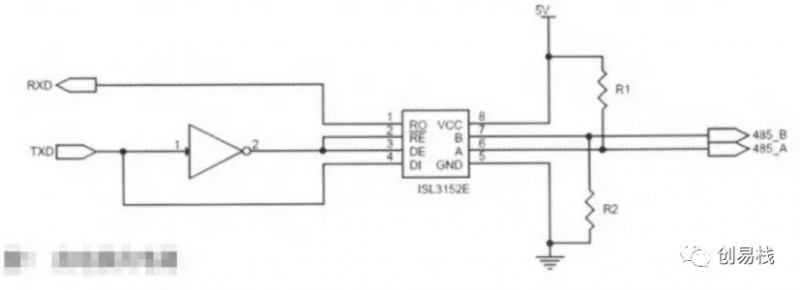
图 3 使用反相器自动切换电路
在空闲状态下,串口的发送信号 TXD 为高电平,经过反相器后输出低电平,使 485 芯片处于接收状态,而 RS485 总线由于上下拉电阻的作用处于 A 高 B 低的状态。当发送数据时,TXD 信号线上的低电平比特位控制 485 芯片进入发送状态,将该比特发送出去。而高电平比特位则使 485 芯片处于接收状态,由于 RS485 总线上下拉电阻把总线置于 A 高 B 低的状态,即表示发送了高电平。
简单说,这种电路,就是发送低电平时,485 芯片是 发送状态,而发送高电平时,485 芯片属于接收状态。
优势:
只需要增加一个反相器就可以实现,无需软件的干预,反相器可以使用一个三极管即可以实现,成本十分低廉(几分钱);
劣势:
由于上下拉电阻不可能选值太小,否则会影响正常发送的数据电平。所以这种换向模式在发送高电平时的驱动能力,并且,理论上我要求方向引脚要比数据先切换方向,但是由于方向引脚经过了反相器,达到芯片的时间变长了,比数据晚到,所以速率太高的情况容易丢包。如果需要驱动多个从设备,就会显得力不从心,并且驱动能力太弱,只能短距离传输;并且传输速度不能太快,一般使用 9600bps。
二、RS485 方向切换的方案 2:使用软件控制方向
市面上大部分的内置 RS485 的产品基本都是采用此类的方案,如下图 4 中的 RS_EN 引脚。具体的 实现方式是:在空闲器件,RS_EN 为低电平,MCU 处于接收状态,在准备发送数据之前,MCU 会拉高 RS_EN,U1 处于发送状态,发送完毕之后,RS_EN 重新处于低电平,U1 处于接收状态。
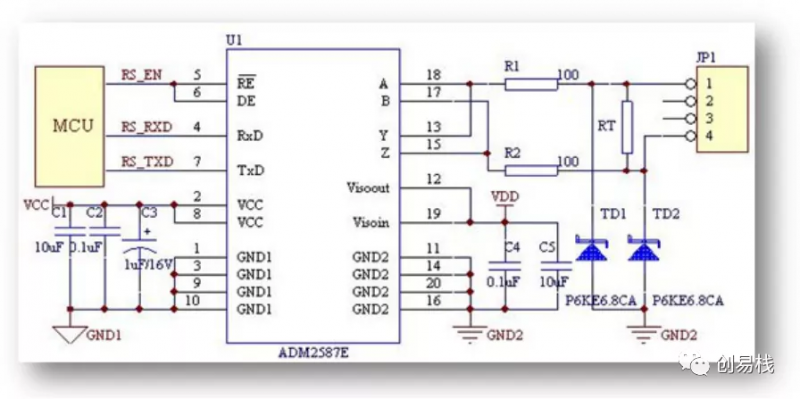
图 4 使用软件控制方向切换
此类方案的关键是软件需要掌握好 RS_EN 引脚的高低电平的时机,假设发送完数据后,没有及时切换到接收状态,而此时从机又回复数据,此时就会引起丢包,就会出现文章开头图 2 中的情形。不幸的时,软件工程师的水平参差不齐,特别是在运行操作系统(Linux、WIndows 等)以后,想要十分准确控制方向引脚的高低电平已经十分困难。
优势:
无需增加任何的硬件成本,且 RS485 的驱动能力不受影响。
劣势:
依赖于软件控制方向引脚,如果运行复杂的操作系统,控制引脚的优先级不够高,或者软件的优化的不够好,都会导致方向引脚的切换不及时,到时数据的丢包。并且,是否丢包还取决于从机的回复时间,测试过程不一定能够测试出来
三、RS485 方向切换的方案 3:使用触发器控制方向
为了克服反相器换向的缺点,出现了一种由 RS 触发器控制的自动换向技术,如图 5 所示。这个电路的关键是反相器和 RS 触发器之间的由二极管、电阻、电容组成的充放电电路。在空闲状态下,485 芯片仍处于接收状态。当 TXD 信号线上发送数据的低电平起始位时,反相器输出高电平,通过二极管为电容迅速充电,使 RS 触发器 R 端为高电平,S 端为低电平,触发器输出高电平,把 ISL3152E 置于发送状态;当 TXD 信号线转换为高电平时,反相器输出低电平,电容通过电阻缓慢放电,使得 R 端暂时仍处于高电平状态,加上 S 端的高电平状态,使触发器的输出保持前面的高电平状态,485 芯片仍处于发送状态。电容经过一段时间放电后,R 端电压转变为低电平,则触发器输出低电平,把 485 芯片置回接收状态。通过选择电阻和电容值,我们可以控制放电速度,使得一个低电平的起始位足以在整个字节发送。此类方案参数一致性非常差,实际使用的都是技高人胆大的。
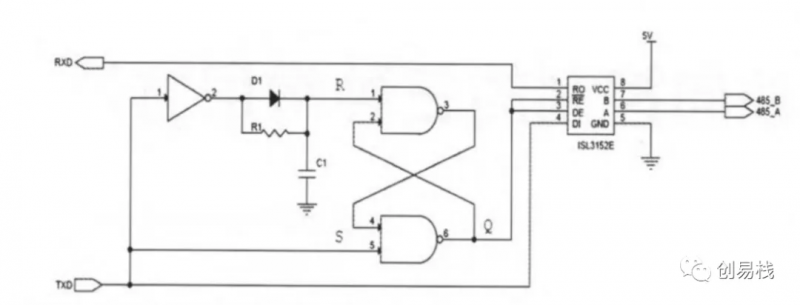
图 5 使用触发器切换方向
优势:
无需软件干预切换方向,驱动能力强(取决于 RS485 芯片)。
劣势:
1. 增加的器件较多;
2. 不同的波特率需要匹配不同的 RC 参数
3. 温度、老化、一致性等问题,会导致 RC 参数变化,从而导致切换时间错乱导致丢包
四、RS485 方向切换的方案 4:max13487 芯片
为了克服软件参与的方向控制不确定性,美信公司发布了宣称首款支持芯片自动换向的 RS485 芯片,如下图 6,对比其他的 RS485 芯片,MAX16487 的 /RE 引脚有两个用于:
(1)/RE 为低电平时,打开 RO 方向的接收数据。
(2)/RE 为高电平时,芯片进入自动方向切换模式。
一般使用我们将 /RE 连接高电平,即自动换向模式。
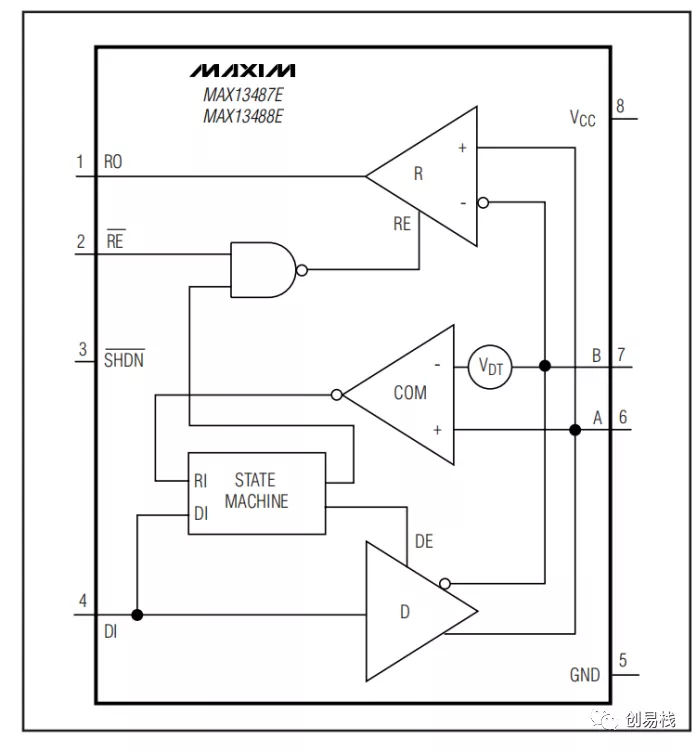
图 6 MAX13487 内部框图
由于美信没有公布内部的逻辑原理,只描述内部有一个状态机,我们只能外部猜测其工作原理:
1. 空闲模式下,数据流方向为 RO 方向;此为状态 1;
2. 当串口端有数据发送时,由于起始位为低电平,经过逻辑功能 D 后,A<B,经过 COM3. 逻辑功能且反相后,RI 为高电平。此状态为数据发送状态 2。
4. 经过一系列的逻辑运算(以 RI、DI 为输入,但是不知道其内部的原理);状态机检测到数据发送完毕,芯片变成接收状态 1。
优势:
由芯片自动切换方向,无需软件干预切换方向,驱动能力强,通信速率高,MAX13488 宣称最高可以到 16Mbps,与普通的 RS485 芯片性能一样。
劣势:
价格比普通的 RS485 芯片贵一倍以上。
五、RS485 方向切换的方案 5:周立功芯片 RSM(3)485PHT
周立功公司将 RS485 的三个相关的功能模块:DC 电源、隔离、RS485 芯片三合一,封装在同一个芯片内部,由于没有内部的资料,我们无法获知其内部的逻辑功能。官方资料宣称最高速率可以达到 500Kbps,对于一般的应用足以。
优势:
由芯片自动切换方向,无需软件干预切换方向,驱动能力强,通信速率高,DC 电源、隔离、RS485 芯片功能三合一,节省板卡空间。
劣势:
价格比分立器件搭建 RS485 电路贵,且一旦损害需要要整体更换。
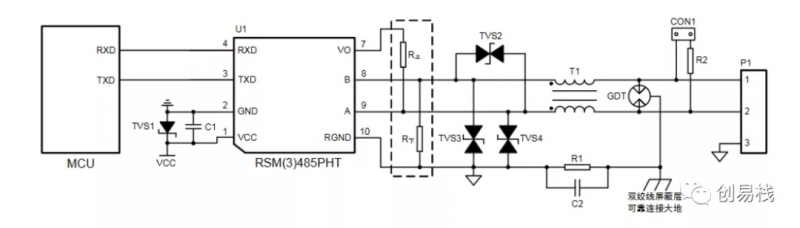
图 7 RSM(3)485PHT 原理图
六、总结
上述我们提供了 5 种 RS485 自动切换方向的方法:分别是反相器法、软件控制法、触发器法、美信 MAX13488 芯片、周立功 RSM(3)485PHT。
反相器法由于驱动能力太弱、速率太低,仅适用于要求不高的调试场合,工控场合慎选。
软件控制法对软件的要求较高,特别是带操作系统的芯片,软件控制的时机较困难。
触发器法由于参数一致性太差,只适合波特率恒定、速率不高的场合;
美信以及周立功提供的方案已经芯片化,经过了大量的市场验证,且有大公司做背书,可靠性、温度性都有很大的保障,优先推荐。
编辑:hfy
-
如何自动切换RS485 RTS引脚2018-09-17 4525
-
关于双向485光端机中RS485数据方向问题的分析2020-04-02 2910
-
嵌入式系统应用中如何实现RS485的方向切换?2021-05-24 2073
-
MCU中RS485接口设计资料分享2022-02-08 1734
-
几种RS485接口收发方向转换方法2015-12-21 996
-
关于RS485 RS422 的资料2017-02-07 1508
-
RS485方向切换的方案及分析2020-09-16 6501
-
RS485方向切换的方案2020-09-25 3408
-
RS485方向切换的方案分析2020-10-15 5228
-
关于RS485的使用2021-12-20 1825
-
五种RS485自动切换方向的方法2022-03-29 11950
-
5种RS485电路自动切换方向的方法、优劣势对比2023-01-10 6823
-
5种RS485电路自动切换方向的方法和优劣势对比2023-03-13 4093
-
RS485总线切换设计电路的5种方案2023-03-14 9862
-
关于RS485收发的两种控制方法2023-09-19 7148
全部0条评论

快来发表一下你的评论吧 !
