

LabVIEW:适合点云平滑的双边滤波器
描述
摘要:
我们通过扫描仪获得物体的点云,经常掺杂着噪音。产生噪音的原因可能有很多多种,例如,切向的采集方向、环境光干扰、物体材质的反射等因素导致。因此设置一种滤波方法,可以去除噪音有保留物体原有物体的尖锐特征信息至关重要。本文设计了一种适合点云平滑的双边滤波器,既可以高效的去除噪音,又可以保留物体尖锐特性。
背景介绍:
对三维采集设备获取的点云进行去噪平滑处理是当今几何处理研究中最重要的任务之一。实际上获得点云的方法有很多种,基于照相技术的结构光方法、基于激光的三角测距方法,点云采集设备越来越流行,并且出现了价格便宜精度低的设备,所有这些技术演变都需要我们设计一种高效的去噪滤波工具从噪杂的点云集中恢复出物体本来的点云集。
数据输入:
输入数据是无序的三维点云坐标,不含法向,以及该片点点云的参考法向(不管是激光扫描还是基于深度相机的设备采集的点云都已知硬件在世界做坐标系的位置,点云的整体法向是朝向硬件的),输入法向的目的是为计算后的法向进行定向,当然我们采用的双边滤波方法是适应具有二义性的法向的,但为了后续处理还是需要对法向进行定向。
点云:[3*n]
参考法向:[3]
平滑参数:法向权重、距离权重及迭代次数
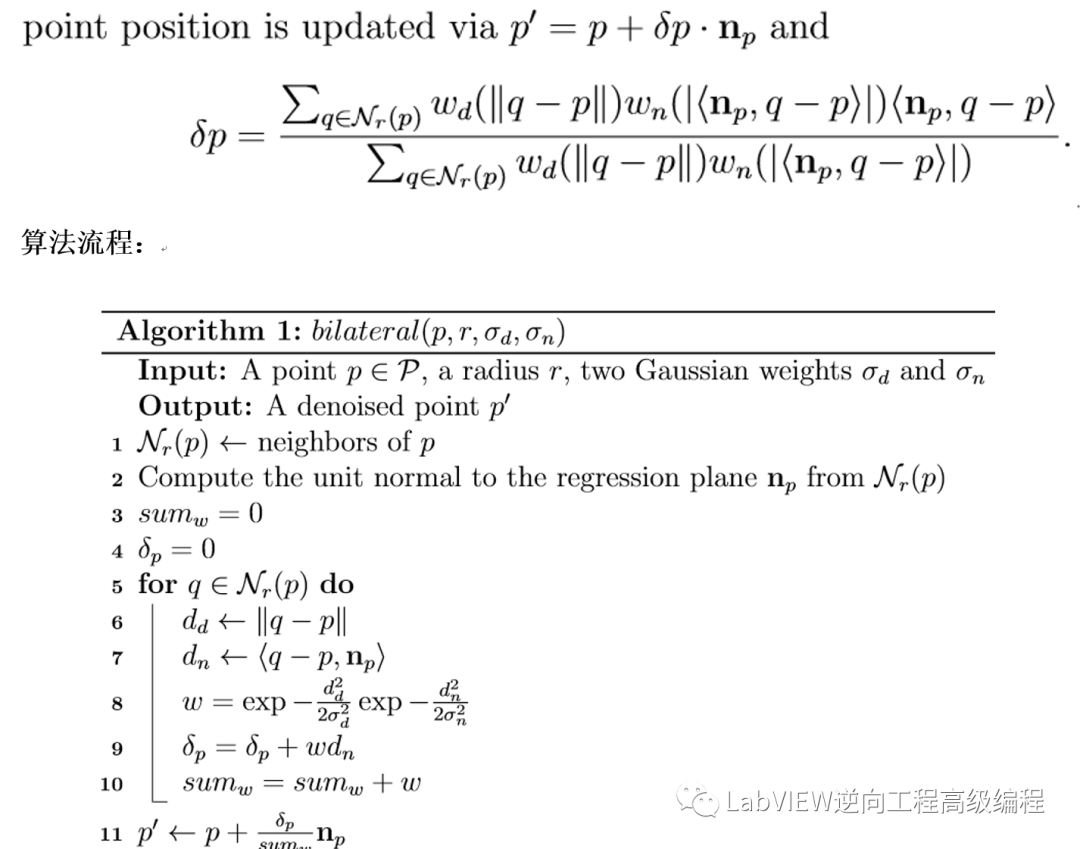
平滑算法:
LabVIEW验证:
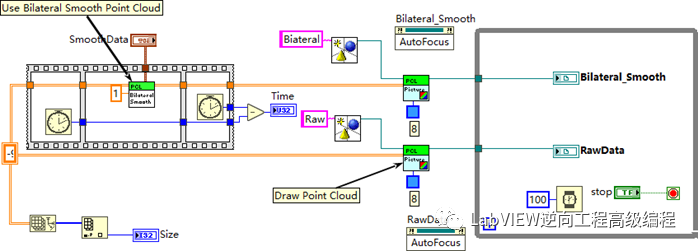
参数调整:
通过调整Normal_Weight(法向影响因子)与M_weight(距离影响因子)及迭代次数来调整平滑效果。该方法主要是参考法向及距离的影响,尖锐的细节通过调整参数同样可以保留。
该方法已经加入到3D_Vision_Advanced_Toolkit For LabVIEW中!
参考文献:
https://www.researchgate.net/publication/320703396_The_Bilateral_Filter_for_Point_Clouds
责任编辑:xj
原文标题:LabVIEW_基于双边滤波的点云平滑
文章出处:【微信公众号:LabVIEW逆向工程高级编程】欢迎添加关注!文章转载请注明出处。
-
高斯滤波和双边滤波的区别2024-09-29 2241
-
labview如何设置滤波器的频率2023-12-28 5012
-
空间滤波器matlab实现2023-02-16 1612
-
基于递推算术平均算法的平滑滤波器设计2022-12-13 2705
-
数字滤波器labview程序2022-04-14 1212
-
labview 中 切比雪夫2 型滤波器-通向公式?原理2020-03-20 3062
-
图像处理基础(5):双边滤波器2018-09-06 1128
-
双边滤波原理_HLS实现Bilateral Filtering双边滤波器2018-06-29 11634
-
双边滤波点云去噪算法2018-01-05 1480
-
采用密度k_means和改进双边滤波的点云自适应去噪算法_郭进2017-03-19 1297
-
基于LabVIEW平台的IIR数字滤波器设计2016-01-20 996
-
【测试之王Labview】 制作一个简易平滑滤波器2014-11-09 17305
-
基于LabVIEW的FIR数字滤波器设计2009-10-16 6805
-
基于LabVIEW的数字滤波器的设计2009-08-29 1406
全部0条评论

快来发表一下你的评论吧 !
