

MEMS陀螺仪在自动驾驶汽车中的应用及发展
电子说
描述
自动驾驶汽车,机器人和工业设备的发展推动了陀螺仪市场的升温,这些设备都要求更高的精度和更小的体积。
多年来,陀螺仪一直用于导航任务。经典的设计是机械陀螺仪,现在也有MEMS陀螺仪,一般高性能单元可能非常昂贵。
对于性能要求较低的应用,比如手机、游戏机等,由于其体积小,成本低,微机电系统(MEMS)惯性测量单元(IMU)变得越来越流行。但是,需要这些MEMS器件的性能一直稳步提高,从而使它们能够扮演更重要的角色。目前,大部分MEMS陀螺仪仍需要其他传感器融合应用,检验输出的结果。
目前,学术界虽然出现了很多低漂移陀螺仪,而且各种陀螺仪架构也很简单,但是,这种技术仍没有成功走近真实的商业市场。
对于自动驾驶汽车来说,由加速度计和陀螺仪组成的IMU非常重要,能够完成导航定位的任务。但价格较低的MEMS版本需要通过全球导航卫星系统(GNSS)信号以及来自摄像头,雷达和激光雷达的其他输入以及磁力计来进行校正。尽管,近几年随着性能的提高,一些产品只需要很少的校正。不过,它们不太可能很快就能够完全满足关键应用的需求。
IMU
IMU通过跟踪线性和旋转惯量的变化来测量运动。它们至少由两种不同类型的传感器,加速度计和陀螺仪组成。这些传感器可以使用传统的宏尺度技术来构建,也可以通过使用MEMS技术来构建。
加速度计可通过感应线性加速度来测量线性运动。陀螺仪(或简称为陀螺仪)可测量方向变化。
理想情况下,将加速度计或陀螺仪组合在单个芯片上,三个轴可以提供更好的轴对齐,并且可以确保两种传感器之间的最佳轴对齐。磁力计一般不能集成在单片中,因为它们的结构与加速度计和陀螺仪不兼容。
虽然单片集成是可能的,但IMU通常由用于不同传感器类型的共封装芯片制成。
大多数IMU是使用三个单独的芯片组装的(三轴陀螺仪,三轴加速度计和三轴磁力计)。高性能IMU可能包含三个单独的单轴陀螺仪芯片,并且可能包含五到九个芯片。在这种情况下,需要从正交性的任何偏差中进行调整。
无论IMU是包含单个芯片,还是组合了单独的加速度计和陀螺仪芯片,每个传感器的每个轴都会被计数。这提供了一个所谓的六轴传感器(如果没有磁力计)。具有三轴磁力计的IMU被视为九轴传感器。
航位推算,漂移,等级和价格
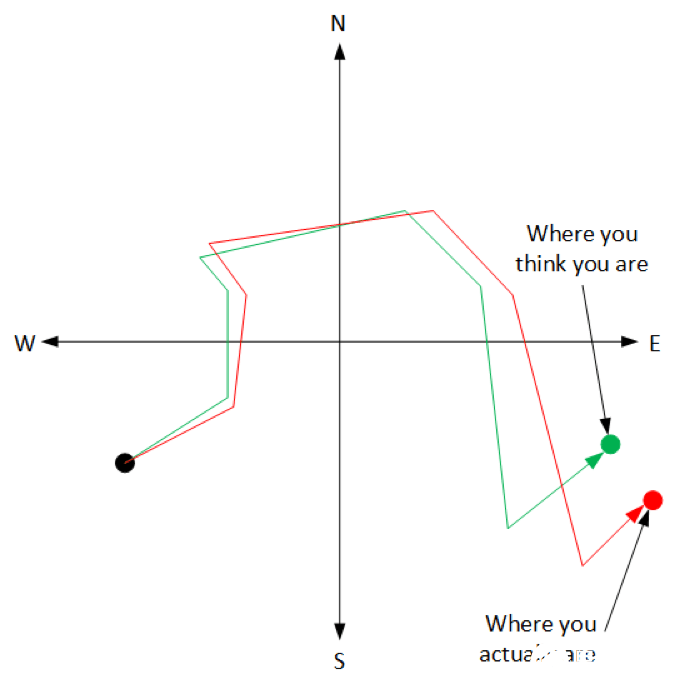
航位推算是指通过跟踪位置和方向随时间的变化来测量位置的过程。以给定的速度沿特定方向行驶将产生一个的位置。从该位置继续行驶到一个新位置。
然而,挑战在于没有任何测量是没有错误的。每个测量位置都会有一定的误差,而下一个位置的测量也会有误差,并且该误差将加重第一个位置的误差。这些误差可能累积到实际位置可能与计算出的位置明显偏离的地步。
如果用性能来定义这些系统的应用等级,那么以偏置稳定性(或偏置不稳定性或漂移)来衡量。漂移是以度/小时或每小时累积的方向误差度数为单位的。
加速度计和陀螺仪都有误差,但是陀螺仪主导了整体漂移。这导致了IMU根据其适合的应用进行分级。
最苛刻的应用仍然需要机械传感器,并且非常昂贵。
较旧的机械模型正在让步给较新的技术,其中包括正在逐步改进的MEMS技术。MEMS单元可能会侵蚀FOG技术今天可以解决的某些问题,但将来不太可能取代HRG和RLG技术。预计将增长到足以使MEMS失去低端地位的同时,仍将保持增长并保持自己的地位。
MEMS技术降低了低端IMU的价格,这些IMU主要用于商业(如智能手机)和工业应用。
博世产品经理Peter Spoden和Michael Rupp表示,MEMS陀螺仪的漂移已减半,并有望进一步改善。他们说:“ 10°/ h的不稳定性一直是MEMS的行业标准,” 如今,使用MEMS可以达到1至5°/ h。对于未来,低于1°/ h的范围似乎可以实现。
那么,MEMS技术会继续进入高端应用领域吗?随着自动驾驶汽车的出现,人们对针对汽车市场定价的更高质量的传感器重新产生了兴趣。但是,尽管一家公司似乎已朝着这个方向迈出了一大步,但大多数制造商认为,由于IMU通常与其他技术结合以纠正错误,因此进一步的改进并不是真正重要的。
传感器融合
尽管MEMS IMU在任何长时间内都不可能进行航位推算,但MEMS陀螺仪仍被定位用于安全关键型应用,例如自动驾驶汽车导航。这是因为陀螺仪(通常是IMU)只是一种导航技术。
位置信息的主要来源仍然是GNSS信号,例如GPS。西门子业务部门Mentor的应用工程顾问Jeff Miller表示:“许多用例都依靠GPS使用卡尔曼滤波器等进行漂移校正,因此他们不必担心长期漂移。” 当车辆进入隧道或停车场,传递信号的卫星不再“可见”时,这种方法将失败。在这种情况下,IMU可以提供短期位置信息,直到重新获取GNSS信号为止。
另一位专家菲茨杰拉德说:“如果您要能够承受GPS的5秒模糊测试,并且以50至70英里/小时的速度行驶,则需要一个非常好的陀螺仪。” “如果您只担心一秒钟的退出,那么也许您可以摆脱精度较低的陀螺仪的困扰。” 但是,例如阿尔卑斯山中最长的公路隧道是哥德哈德公路隧道,长约17公里(10.5英里)。以60 mph的速度行驶时,这意味着离GNSS信号的距离会略微超过10分钟,而对于MEMS IMU来说,这是很长的时间。
磁力计还用于帮助校正陀螺仪的漂移。磁力仪像陀螺仪一样测量方位,这提供了一个相对稳定的参考点,因此算法可以同时查看陀螺仪和磁力计的结果来确定方向。
GNSS信号不可用时会与IMU进行折衷(这意味着一个或另一个正在使用中),而GNSS信号与之不同,此处两个传感器不断融合在一起,以达到比单独使用任一个传感器更准确的结果。这是所谓的传感器融合的特定示例。它合并大量传感器输出的结果,以产生更好的组合结果。
磁力计也有其缺点,主要是有些物体可能影响磁场。被称为“磁异常”的金属车辆,电梯,甚至大的岩石露头都会使磁力计的读数失真。在此类异常持续存在的应用中(例如,在大型电动机附近或在电气室内),不能可靠地使用磁力计。
但是,在那些应用程序之外,异常可能是暂时的。没有一种拒绝异常的固定算法。
除此之外,还有许多其他技术可以帮助定位服务。IMU提供“由内而外”的视图,移动传感器在其中确定自己的位置。外部信号(如GNSS)提供“从里到外”的视图,其中外部因素告诉移动的物体在哪里。例如,在购物中心内,各种WiFi或蓝牙信标都可以对购物者及其智能手机的位置进行三角测量。智能手机中的IMU和信标信号一起可以提供足够精确的定位,以在商店内定位购物者。
当然,这种方法也可以在道路上使用。可以开始在道路,基础设施中放置信标。比如将信标放在隧道中。
对于自动驾驶汽车而言,至关重要的一点是,偏离路线的余地很小。如果您在高速公路上开车,您可能无法承受超过10或20厘米的漂移,否则有可能撞到相邻的汽车。
这是高级驾驶员辅助系统(ADAS)尤为重要的地方。这种系统为车辆配备了许多额外的传感器,尤其是摄像头,雷达和激光雷达。使用AI算法将这些传感器信号组合在一起,以识别预期和意外的项目,从而提供了一个巨大的传感器融合解决方案。
博世团队表示:“无人驾驶汽车始终必须获得环境认可。” “ IMU绝不能单独使用,而必须始终是一个完整系统的一部分,该系统由激光雷达,雷达和软件等其他设备组成。作为这种系统的一部分,今天的IMU就足够了。”
但是,对于可能无法停留在涂有油漆良好线条的城市道路上的“随处可见”车辆,它们可能不够用。在如此遥远的地区,自动驾驶仍是不能解决的问题(尤其是在没有蜂窝通信的情况下)。菲茨杰拉德说:“要让自动驾驶汽车在没有这些车道标志或交通信号灯或停车牌识别的地形上行驶,将是非常困难的。”
“我们需要将ADAS车辆(具有越来越高的自治性)和机器人汽车(或Robotaxis)分开,它们已经完全自主,但是在地理上受到限制。” “由于机械人的业务模型(移动即服务)不同,目前暂时没有成本约束。但是他们对性能有很高的要求。”
对于配备ADAS的汽车,购买价格是主要的经济考虑因素。因此,根据车的成本控制,IMU的价格必须低于100美元,这样在60 km / hr的速度下,它们在20到30秒内的漂移精度仅为几厘米。相比之下,robotaxis可以忍受更高的精度价格-每行驶1公里仅漂移几厘米的系统,其价格就高达10,000美元。
需要导航的低成本车辆可能仍然认为高质量MEMS IMU过于昂贵。对于那些想要将这类陀螺仪用于无人机,机器人和不支持300美元价格的产品的人们来说,它开始崩溃。他们可以花30美元购买MEMS陀螺仪,但300美元太高了。”
对于所有的融合传感器,甚至可能有人会质疑某些驾驶应用是否仍需要IMU。其他传感器(雷达,摄像机,激光雷达等)的组合所取得的进展提出了惯性系统从长远来看是否有用的问题。在某些时候,所有其他传感器都可以在没有此类传感器的情况下校准汽车的位置。
结论
尚不清楚MEMS陀螺仪将进一步改善多少。在大多数情况下,它们正在逐渐变得更好。但是,由于在此类汽车中设计了大量传感器融合技术,因此他们没有很大的压力去改进最明显的应用,即汽车。
如果他们能够实现更高的运营等级,那么它们可能会降低高端成本,但是其中许多应用程序都有严格的要求和较低的体积,因此投资回报率不确定。巨大的改进将需要苛刻的新应用程序。
责任编辑:gt
-
MEMS技术在自动驾驶汽车中的应用2024-11-20 2856
-
XV7181BB 陀螺仪传感器在自动驾驶设备中的应用2024-06-13 1341
-
什么是MEMS陀螺仪?2023-07-07 6334
-
陀螺仪的应用2020-09-04 2422
-
工业和汽车级MEMS陀螺仪的应用2020-07-14 5556
-
MEMS陀螺仪介绍2019-08-28 2927
-
自动驾驶汽车的处理能力怎么样?2019-08-07 2932
-
MEMS陀螺仪中主要噪声源的预测和管理2018-10-22 2801
-
浅谈MEMS陀螺仪技术 MEMS是否取代光纤陀螺仪技术2018-07-30 14700
-
MEMS陀螺仪在战术武器应注意的要点2018-06-13 2268
-
MEMS陀螺仪技术原理_三轴陀螺仪技术原理2017-12-01 16620
-
利用MEMS陀螺仪实现低噪声反馈控制设计2017-08-12 5553
-
ST mems陀螺仪2008-09-23 2673
全部0条评论

快来发表一下你的评论吧 !
