

i.MX8MM核心板之管道巡检机器人控制平板方案
控制/MCU
描述
一、 产生背景
地下管网是一座城市的重要部分,承担着群众日常生活的运转。但是地下管网如果“生病”了,却很难发现。如果利用管道机器人探测污水管网直接避免了人工排查存在的安全隐患,同时还提高了检测的效率和准确性。
a、排水管道功能性检测
主要是以检查管道排水功能为目的的检测,一般检测管道的有效过水断面,并将管道实际过流量与设计流量进行比较,以确定管道的功能性状况。对于这类检测出来的问题一般可通过日常养护等手段进行解决
b、排水管道结构性检测
主要是以检查管道材料结构现状为目的的检测,这类检测主要了解管道的结构现状以及连接状况,通过综合评估后确定管道对地下水资源及市政设施是否带来影响。对于这类结构性问题被检测出来后一般需要通过修复的手段来解决。
二、 管道巡检机器人产品构成
包括 爬行器(轮式机器人),工业计算机和电缆车三部分。爬行器携带高清网络摄像头、有毒气体传感器,红外传感器等设备进入管线探测巡检,工业计算机负责远程控制爬行器,即时观察回传的管线内部视频,生成报告并存储,电缆车负责给爬行器提供电力和通信用缆。
三、 现有产品的问题
整套产品十分笨重,出现场时携带不方便,于是出现了一个需求是尽量把整套产品做的更便携化。轮式机器人和电缆车本身没有太多便携化的空间,笨重的防护工业计算机就成了便携化的方向 (使用ARM的基本需求:便携化,需求来源:户外作业)
四、 产品示意图
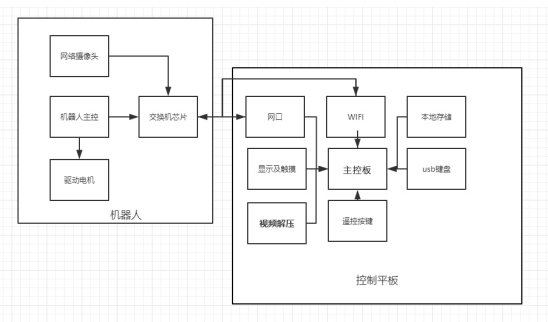
嵌入式控制平板取代工业计算机
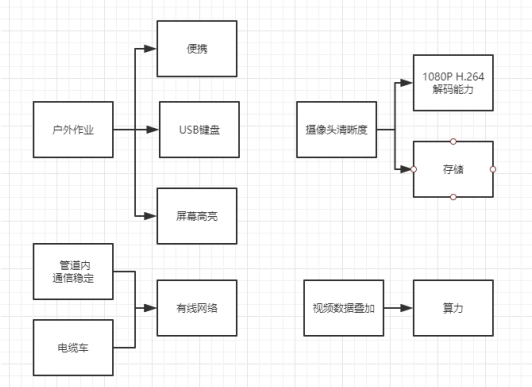
通信:通过网口或wifi与爬行器主控和网络摄像头通信。
控制:通过网口或wifi远程对爬行器主控发送各驱动电机的控制指令。
显示:高亮屏幕显示网络摄像头回传的视频。
交互:触摸、按键或遥杆进行远程控制,USB键盘输入必需资料。
计算:本地解码网络摄像头视频,并即时叠加管道信息,爬行器信息等资料到屏幕。
飞凌嵌入式为管道巡检机器人提供Cortex-M4平台方案—FETMX8MM-C核心板,i.MX8MMini四核64位处理器设计,可提供多种音频接口和多种外设接口。
五、FETMX8MM-C核心板方案
1. 操作系统:Android
2. 硬件接口:网口1个,WIFI,USB接口,存储,IO。
最重要的基础功能是1080P H.264视频解码8MM的视频解码性能是最好的,并且性价比也高。如果远端摄像头压缩的视频在平板解码有拖慢或延迟就容易会对爬行器失去控制。
-
基于米尔RK3576核心板的国产割草机器人解决方案2026-04-24 455
-
强悍的I.MX8MP核心板2025-02-13 1005
-
基于飞凌嵌入式RK3568J核心板的工业机器人控制器应用方案2024-05-11 4361
-
恩智浦i.MX8MM核心板在便携式医疗设备产品中的应用2023-11-15 1488
-
恩智浦i.MX8MM核心板在智能售货机产品中的应用方案2023-09-22 1393
-
如何实现拥有强悍功能智能巡检机器人2023-04-12 976
-
MYZR-I.MX6-CB140核心板2022-07-26 2742
-
迅为i.MX8MM 核心板引脚说明(按功能划分)2021-12-28 2743
-
求一种基于嵌入式i.MX8MM核心板的管道巡检机器人方案2021-12-20 1116
-
迅为i.MX8M Mimi 核心板硬件介绍2021-07-29 3704
-
飞凌i.MX8MM-C核心板之机器人控制平板方案的介绍2020-11-17 664
-
FETMX8MM-C核心板之管道巡检机器人控制平板方案分享2020-10-13 2038
-
助力智慧医疗,解析i.MX8MM在麻醉系统中的应用方案2020-08-26 1885
-
【NanoPi NEO Plus2开发板试用申请】巡检机器人项目2017-08-24 2859
全部0条评论

快来发表一下你的评论吧 !
