

基于数字信号处理器DSP2106X实现雷达信号处理系统的设计
处理器/DSP
描述
现代雷达的数字信号处理具有海量运算需求的应用背景,如巡航导弹末制导雷达地形匹配、合成孔径雷达的成像处理、相控阵雷达的时空二维滤波处理等领域。目前,单片DSP难以胜任许多信号处理系统的要求。
世界上第一颗DSP芯片是美国德州仪器(TI)公司于1982年推出的第一代产品:TMS32010。经过十几年的发展, DSP器件在高速度、可编程、小型化、低功耗等方面有了长足的发展。单片DSP芯片最快每秒可完成16亿次(1600MIPS,每秒1600兆次指令)的运算,生产DSP器件的公司也不断壮大。目前,市场占有率前四名依次为:Texas Instruments、Lucent、Analog Device、Motorola,涉足这一领域的公司还有AT&A、Fujitsu、IDT、NEC、Sansung等。
TI公司的DSP档次齐全,应用广泛,但片内RAM较小;Motorola公司的68000系列主要用于通信及仪表;AD公司的ADSP2106X系列不仅具有很强的处理能力,而且有大容量的片内RAM,被高速信号处理设计列为首选。
DSP2106X简介
ADSP2106X是AD公司的一种高性能32位浮点DSP,它的基本特点有:
·最高工作频率为40MHz,时钟周期25ns。
·数据线有48根,地址线有32根,地址范围4G。
·所有指令都是单周期指令,指令长度均为48bit。
·32-bit IEEE浮点运算单元,内含乘法器、ALU和移位器,支持40bit的扩展精度浮点运算。
·10个DMA通道。
·4M bit双口片内存储器。
·有两个同步串口和六个连接口。
·支持多处理器共享总线。
2 基于ADSP2106X的并行处理系统
ADSP2106X提供了强大的实现多处理器并行处理的能力,允许某一处理器直接访问其它处理器的内部双口SRAM,并且这种访问一般不影响被访问处理器的工作,片内的分布总线仲裁逻辑可直接管理6片ADSP2106X和一个宿主机组成的并行系统的信息交换。另外ADSP2106X还具有6个4bit的连接口(Link Ports),每个连接口可以两倍于系统工作时钟的速率传送数据,因此每个连接口在一个时钟周期内能够传送一个8bit数据。在多处理器应用中,ADSP2106X通过其6个连接口实现处理器之间点到点的通信。由ADSP2106X构成的典型多处理器并行系统主要有以下三种形式:共享总线的多处理器并行系统;MeshSP(网格)结构多处理器并行系统;集束多处理器并行系统。
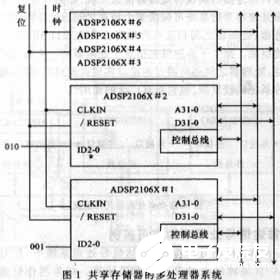
2.1 共享总线的多处理器并行系统
ADSP2106X处理器支持最为常用的共享总线多处理器并行系统,把各处理器的相应信号线相互连接,如DATA 47-0,ADDR 31-0等。此时组成多处理器系统的每一片ADSP2106X的片内存储器统一编址,任何一片ADSP2106X都可以访问其它ADSP2106X的片内存储空间。由于片内SRAM为双口存储器,因而这种访问并不中断被访问处理器的正常工作。在不增加辅助电路的条件下,通过外部总线接口(External Port)直接相连的处理器数量最多为6个,如图1所示。
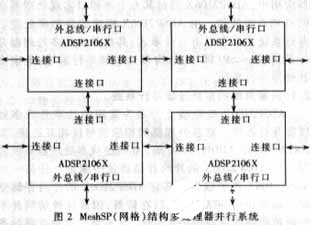
2.2 MeshSP(网格)结构多处理器并行系统
MeshSP是MIT的Lincoln实验室开发的一种大规模并行计算结构。在合适的应用背景下,MeshSP具有很高的效率和灵活性。通过连接口把相邻的ADSP2106X连接在一起,构成了MeshSP结构,如图2所示。具有6个连接口是ADSP2106X的最重要的特征之一,连接口每周期可传送8bit数据,处理器之间传送数据的最大速率为240MB/s。每个连接口都有自己的双缓冲输入和输出寄存器。时钟/回答握手信号控制连接口的传送,传送可编程为发送(输出)或接受(输入)数据。在这种结构中,每片ADSP2106X只与相邻的节点直接通信,避免了总线瓶颈,所以很适合大规模并行系统。若干个ADSP2106X组成一个两维或三维多处理器阵列,阵列中各个处理器通过连接口实现信息交换,数据流输入和输出通过外部总线接口或串行口实现。这种多处理器并行系统特别适合于多维信号处理(如二维FFT算法等)。
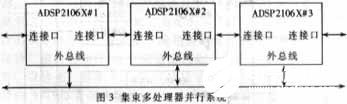
2.3 集束多处理器并行系统
集束多处理器并行系统通过ADSP2106X的外部总线接口和连接口实现各处理器信息交换,如图3所示。集束多处理器并行系统可包括多个相互之间通过并行总线相连接、处理器之间相互可存取对方片内双口SRAM的子系统组成,每个子系统可包括6个处理器和一个宿主机处理器。处理器之间还可通过连接口实现点到点的通信。通常这种系统比较复杂,但它具有广泛的通用性。
3 雷达信号处理中的应用实例
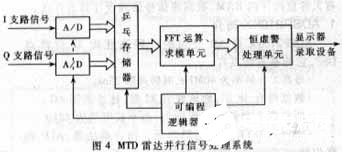
在MTD(动目标检测)雷达信号处理系统中,信号经过A/D采样后由DSP进行FFT运算,结果再作恒虚警处理,以检测动目标的有无。由以上三种典型连接方式,结合本系统的特点,进行比较:
(1)通过连接口把相邻的ADSP2106X连接在一起,构成MeshSP网格结构(图2所示)。这种结构中,每个ADSP2106X只与相邻的节点直接通信,避免了总线瓶颈,所以很适合大规模并行系统。ADSP2106X拥有6个连接口,可以组成二维或三维网格结构,但布线的难度也比较大。另外,考虑到本系统数据量大,只通过连接口传输速度太慢,故不采用这种连接方式。
(2)共享总线的多ADSP2106X系统(如图1所示),由于ADSP2106X片内具有较大容量的双口SRAM,可以省掉外接的全局存储器和各个处理器外接的局部存储器。每个处理器片内存储器既是其局部存储器,又是系统共享存储器(全局存储器)的一部分。由于每个处理器的工作程序放在其片内的双口SRAM中,因此各个处理器可真正实现并行处理。这是ADSP2106X的存储器结构所决定的,也是其它类型DSP处理器(如TMS320C40等)所不具备的优良性能。这种连接方式能达到高速传输数据的要求。但是对于本系统来说,要使用6片DSP共总线,达到了ADSP2106X共总线的极限,可能总线的驱动能力不足,故对布线提出很高的要求。
(3)为了保证系统的可靠性,决定采用共总线的同时,将连接口也相应的连接起来,增加系统的灵活性,确保系统能够完成实时处理,即采用图3所示的结构。但结合实际要求,本系统的结构框图见图4。其中FFT运算求模单元为6片ADSP2106X的集束多处理器并行结构,恒虚警处理单元为2片ADSP2106X的集束多处理器并行结构,显示录取设备为笔记本电脑。可编程逻辑器件负责控制整个系统的时序及相关逻辑。经过实际电路的测试,该系统达到了设计指标的要求。
综上所述,基于ADSP2106X并行结构的雷达信号处理系统,所需外围器件少,电路设计简单。通过对处理单元进行各种软件编程就可实现系统的功能,具有很强的扩展功能和通用性,大大缩短了研制周期,提高了系统的可靠性。这种通用结构还适用于很多高速实时处理的应用场合,具有广泛的推广应用价值。
责任编辑:gt
-
数字信号处理器(DSP)简介2022-08-02 23388
-
一种基于ADSP21062的雷达信号处理系统调试设计2019-07-19 2679
-
利用FPGA怎么实现数字信号处理?2019-10-17 6409
-
DSP数字信号处理介绍2020-09-22 2063
-
数字信号处理器的特点2020-12-09 2141
-
基于ADSP2106X的高速并行雷达数字信号处理系统2009-11-30 709
-
基于DSP和DSP/BIOS的实时雷达信号采集与处理系统2010-01-16 692
-
数字信号处理器(DSP)2010-01-04 3778
-
基于双数字信号处理器(DSP)的实时相关图像处理系统的设计2011-02-24 765
-
PCI总线实现通用数字信号处理系统2011-08-04 1945
-
DSP是什么?详解DSP又称数字信号处理器2017-05-18 51347
-
基于DSP的数字信号采集处理系统设计2017-10-19 1073
-
DSP数字信号处理器发展及应用简介2017-10-21 1412
-
基于数字信号处理器实现雷达信号处理系统的设计2020-12-31 3516
-
激光雷达信号处理系统2021-11-24 3448
全部0条评论

快来发表一下你的评论吧 !
