

小功率4相步进电机的驱动 及智能驱动方案
描述
01 小功率4相步进电机的驱动
下面是一种驱动电路框图:
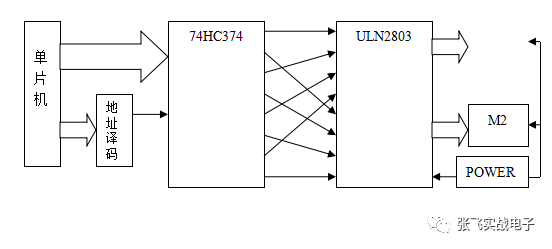
达林顿管阵列ULN2803分别从锁存器取出第0,2,4,6位和1,3,5,7位去驱动两个步进电机.四相步进电机的通电顺序可以有几种:A,B,C,D(4相4拍);AB,BC,CD,DA(4相双4拍);A,AB,B,BC,C,CD,D,DA(4相8拍).为了兼顾稳定性,转矩和功耗,一般采用4相8拍方式.所有这些方式都可以通过循环移位实现(也要有定期监控),为了使4相8拍容易实现,锁存器与驱动部分采用了交叉连接。
步进电机工作在四相八拍模式(即正转的输入信号为1000→1100→0100→0110→0010→0011→0001→1001→1000),对应每个步进电机要有四个信号输入端,理论上向端口输出信号可以控制两个步进电机的工作。寄存器循环移位奇偶位分别作两个步进电机的驱动端的做法,
其思想如下:
LOOP: MOV A,#1110000B;在A寄存器中置入11100000
RR A;右移位
AJMP LOOP;循环右移位
这样在寄存器A中存储的值会有如下循环11100000→01110000→00111000→00011100→00001110→00000111→10000011→11000001→11100000,其奇数位有如下循环1000→1100→0100→0110→0010→0011→0001→1001→1000,其偶数位有如下循环1100→0100→0110→0010→0011→0001→1001→1000→1100.将A输出到P0端口,则奇数位和偶数位正是我们所需要的步进电机输入信号。
而事实上每个电机的动作是不同的,为此我们在RAM中为每个电机开辟一个byte的状态字节用以循环移位.在每一个电机周期里,根据需要对每个电机的byte进行移位,并用ANL指令将两个电机的状态合成到一个字节里输出此时的A同时可以控制两个电机了
步进电机的速度由驱动脉冲的频率决定,移位的周期不同,电机的速度也就不同了.前面提到的电机周期,应该取各种可能的周期的最大公约数.换句话说,一旦电机周期取定,每个电机移位的周期应该是它的倍数.在程序中,对每个电机的相应时刻设定相应的分频比值,同时用一个变量进行加一计数:每到一个电机周期若计数变量<分频比值,则计数变量加1;若相等,则移位,计数变量清零.这样就实现了分频调速,可以让多个电机同时以不同的速度运转.
另外,也可以采用传统的查表方式进行驱动,程序稍长,但也比较稳定,这种方法非常适合三相步进电机。
02 步进电机的智能驱动方案
步进电机有可以精确控制的优点,但是功耗大,效率低,力矩小。如果选用大功率步进电机,为了降低功耗,可以采取PWM恒流控制的方法。基本思路是,用带反馈的高频PWM根据输出功率的要求对每相恒流驱动,总体电流顺序又符合转动顺序。需要力矩小的时候应及时减小电流,以降低功耗。该方案实现的电路,可以采用独立的单片机或CPLD加场效应管驱动电路以及电流采样反馈电路。
关于步进电机驱动电路设计的内容就到这里了,是不是对步进电机还有一些疑惑呢?
责任编辑:PSY
原文标题:全!步进电机驱动设计详细讲解
文章出处:【微信公众号:电源研发精英圈】欢迎添加关注!文章转载请注明出处。
-
二相步进电机驱动电路的设计2025-05-28 317
-
步进电机的驱动与控制 三相步进电机的驱动电路2023-03-20 1249
-
基于ULN2003的步进电机驱动2023-03-16 1185
-
两相单极步进电机的驱动电路2023-02-24 5227
-
小功率电机驱动方案及驱动IC的选择指南2021-05-04 6523
-
小功率电机驱动IC怎么选?2021-02-26 2146
-
小功率电机驱动方案及IC的选择2020-12-30 8138
-
步进电机驱动电路图大全(六款二相步进电机/三相反应式/LT2221驱动电路)2018-05-23 63150
-
4相八拍步进电机驱动程序2018-03-02 1959
-
基于FPGA的两相步进电机细分驱动电路设计2010-05-11 929
-
步进电机各相绕组驱动电路2010-01-09 1278
-
一种小功率步进电机驱动电路的设计与实现2009-09-21 948
-
五相步进电机驱动电路2009-02-09 5528
-
四相步进电机驱动程序2008-10-21 7705
全部0条评论

快来发表一下你的评论吧 !
