

伺服驱动器控制模式的接线及其注意事项
电子说
描述
我们在平时控制伺服电机的时候,经常用到的控制模式就是三种模式分别是速度控制模式、位置控制模式、转矩控制模式。现以三菱的伺服驱动器为例,下面分别了解一下每个模式的控制接线及其注意事项。
一、速度控制模式
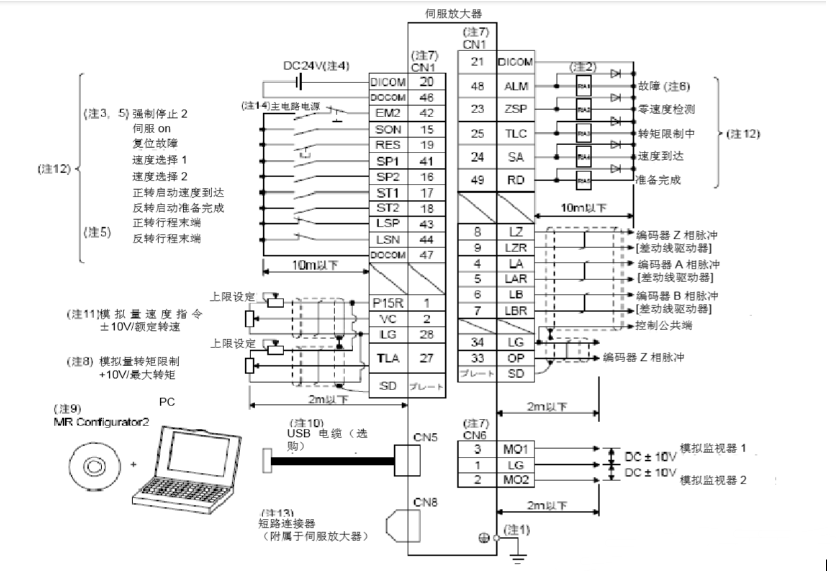
注1.为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带记号的端子)连接到控制柜的保护接地(PE)上。
2.请正确连接二极管方向。连接错误,可能会出现伺服放大器发生故障不能输出信号,EM2(强制停止2)等的保护电路不能动作的情况。
3.运行时,请务必将EM2(强制停止2)信号保持ON状态。(B接点)
4.请从外部供给接口用DC24V±10%500mA电源。500mA是使用全部输出信号时的值。通过减少输入输出点数能够降低电流容量。请参考3.9.2项(1)记载的接口需要的电流。
5.运行时请务必将EM2(强制停止2)、LSP(正转行程末端)以及LSN(反正行程末端)ON。(B接点)
6.ALM(故障)在未发生报警的正常情况下ON。
7.同样名称的信号在伺服放大器内部是联通的。
8.在[Pr.PD03]~[Pr.PD22]设置能够使用TL(外部转矩限制选择)时,即可使用TLA。
9.请使用SW1DNC-MRC2-E。
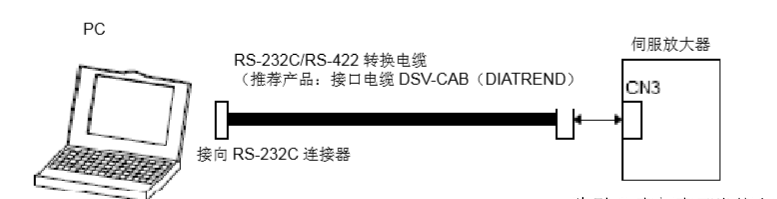
10.使用CN3连接器的RS-422通信(计划应用)能够和个人电脑连接。但是,USB通信功能(CN5连接器)和RS-422通信功能(CN3连接器)是互斥的。不能同时使用。
11.输入负电压时,请使用外部电源。
12.漏型输入输出接口的情况。
13.不使用STO功能时,请在伺服放大器上安装附属的短路连接器。
14.为了防止伺服电机出现预期以外的再启动,在创建电路时,应设置成主电路电源OFF时EM2同时OFF。
二、位置控制模式

注1.为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带记号的端子)连接到控制柜的保护接地(PE)上。
2.请正确连接二极管方向。连接错误,可能会出现伺服放大器发生故障不能输出信号,EM2(强制停止2)等的保护电路不能动作的情况。
3.运行时,请务必将EM2(强制停止2)信号保持ON状态。(B接点)
4.请从外部提供接口用DC24V±10%500mA电源。500mA是使用全部输出信号时的值。通过减少输入输出点数能够降低电流容量。请参考3.9.2项(1)记载的接口需要的电流。
5.运行时请务必使EM2(强制停止2)、LSP(正转行程末端)以及LSN(反正行程末端)保持ON状态。(B接点)
6.ALM(故障)在没发生报警的正常情况下ON。OFF(报警发生)时,通过顺控程序停止可编程控制信号。
7.同样名称的信号在伺服放大器内部是联通的。
8.指令脉冲串输入采用差动驱动方式的情况。采用集电极开路输入方式时在2m以下。
9.请使用SW1DNC-MRC2-E。
10.使用CN3连接器的RS-422通信(计划应用)能够和个人电脑连接。但是,USB通信功能(CN5连接器)和RS-422通信功能(CN3连接器)是互斥的。不能同时使用。
11.QD75D不需要本连接。但是通过使用的定位模块,为了达到抗干扰能力,推荐将伺服放大器的LG和控制公共端间进行连接。
12.漏型输入输出接口的情况。源型输入输出接口。
13.不使用STO功能时,请在伺服放大器上安装短路连接器附件。
14.为了防止伺服电机出现预期以外的再启动,在创建电路时,应设置成主电路电源OFF时EM2同时OFF。
三、转矩控制模式
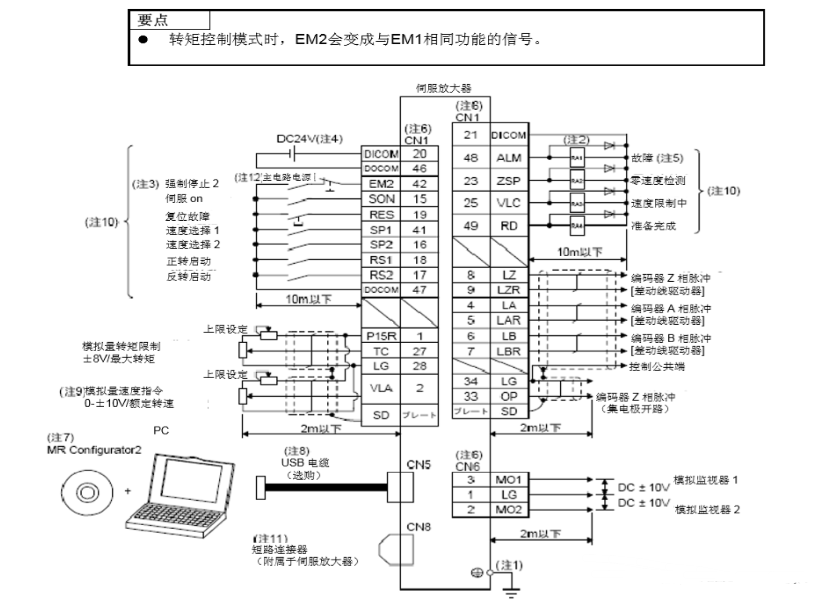
注1.为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带记号的端子)连接到控制柜的保护接地(PE)上。
2.请正确连接二极管方向。连接错误,可能会出现伺服放大器发生故障不能输出信号,EM2(强制停止2)等的保护电路不能动作的情况。
3.运行时,请务必将EM2(强制停止2)信号保持ON状态。(B接点)
4.请从外部供给接口用的DC24V±10%500mA电源。500mA是使用全部输出信号时的值。通过减少输入输出点数能够降低电流容量。请参考3.9.2项(1)记载的接口需要的电流。
5.ALM(故障)在没发生报警的正常情况下ON。
6.同样名称的信号在伺服放大器内部是联通的。
7.请使用SW1DNC-MRC2-J。
8.使用CN3连接器的RS-422通信(计划应用)能够和个人电脑连接。但是,USB通信功能(CN5连接器)和RS-422通信功能(CN3连接器)是互斥的。不能同时使用。
9.输入负电压时,请使用外部电源。
10.漏型输入输出接口的情况。
11.不使用STO功能时,在伺服放大器上安装附属的短路连接器。
12.为了防止伺服电机出现预期以外的再启动,在创建电路时,应设置成主电路电源OFF时EM2同时OFF。
责任编辑人:CC
-
伺服驱动器的工作原理解析 伺服驱动器选型注意事项2024-11-04 3705
-
交流伺服驱动器怎么接线2024-08-14 4615
-
松下伺服驱动器惯量比怎么改2024-06-14 4649
-
PLC怎么控制伺服驱动器2024-06-03 3205
-
伺服驱动器输出电压的测量方法及注意事项2024-01-17 8359
-
TI大功率电机驱动器应用的系统设计注意事项2023-08-08 808
-
调制驱动器初次使用注意事项2023-07-10 1926
-
FAN7085 高边栅极驱动器 - 内部充电路径设计注意事项2022-11-15 882
-
COFT控制模式的Buck LED驱动芯片中 COFF的配置和注意事项2022-10-28 968
-
使用A4988步进电机驱动器有哪些注意事项2021-12-20 4487
-
富士伺服驱动器FALDIC的安全注意事项有哪些?2021-11-02 2243
-
数控车床铣床中应用伺服电机的注意事项是什么2021-06-28 1117
-
别换错了LED驱动器!这三个注意事项不要忘2019-07-02 16836
-
伺服驱动器接地要注意哪些事项八大接地注意事项介绍2019-01-27 11810
全部0条评论

快来发表一下你的评论吧 !
