

如何实现智能交通RFID与视频双机识别系统的资料说明
RF/无线
描述
随着机动车保有量的大幅提升,由此引发的交通问题越来越严重,传统方法也越来越难以对车辆进行有效管理。设计了一种双机匹配识别系统,将RFID与视频识别融为一体,实现信息的自动采集以及前端匹配识别,达到在城市交通道路上对车辆的精确管理。该系统中射频识别部分采用ISO18000-6C协议标准的阅读器、控制器、标签,视频识别部分采用车牌识别一体机,可支持前端摄像、识别、储存等功能。
0引言
随着国民经济水平的提高以及道路交通的发展,智能交通已经成为交通科技领域的研究重点。车牌识别作为智能交通的核心组成部分,在交通管理的智能化方面起着重要作用。目前,主要的道路车辆监控技术是图像或视频识别,这种违章视频抓拍和电子摄像头监管技术在使用中存在一定缺陷,即无法精确地抓拍到每一辆车。射频识别技术(Radio Frequency Identification Devices,RFID)是一种非接触式的自动识别技术,利用射频识别技术可弥补视频识别的不足,为车辆信息的数字化、车辆识别的自动化以及车辆管理的智能化提供了一个很好的智能平台。
本文以城市道路车辆为主要研究对象,通过采集电子标签和视频车牌号码,进行双机匹配识别。可自动对通行车辆进行监控,约束驾驶员的违章行为,提高交通管理水平,减少交通事故的发生。
1 RFID电子标签识别系统
一套完整的RFID系统的组成部分主要有:电子标签、阅读器、天线、应用系统软件。如图1所示。
(1)电子标签
电子标签将耦合元件和存储芯片等模块一并被封装在一张卡内,通过对每张电子标签操作,可随时对标签内信息进行存储和管理,对于特定的信息还可以用加密等方式进行保护。本设计采用遵循ISO18000-6C国际标准的电子标签,每张电子标签存储区域分为四部分:RESERVED区、EPC区、TID区、USER区,所有存储体的逻辑寻址均从00h开始。RESERVED区用于存储kill和access功能所需密码;EPC区用于存储识别标签附着对象的代码;TID区用于存储标签出厂时写入的唯一序列号;USER区用于存储用户特有的数据。本设计中EPC区只作为电子标识使用,并且将车牌号、电子ID号、车身颜色、车辆类型、按照一定的编码规则存储在USER区。编码规则如图2所示。

(2)RFID阅读器
RFID阅读器主要对电子标签内的数据进行读取和写入,利用空间电磁场实现对标签内容的读取和向标签发送控制命令等作用。阅读器的另一个重要作用是决定整个RFID系统的工作频率,阅读器的工作频率和功率将直接决定阅读器与电子标签的通信距离。一般的阅读器包括天线、射频模块、控制模块以及与计算机相连的各类接口模块。
(3)天线
天线是无线射频系统的关键部分,其主要功能是将电子标签发射的电磁波转化为电流信号传送给阅读器,同时将阅读器的电流信号转化成电磁信号通过天线发射出去。当电子标签进入有效的工作区域时,接收阅读器发出的射频脉冲经过整流后给电容充电,当电容电压经过稳压后就可以作为标签的工作电压,进而使电子标签有足够的能量将自身编码信息通过内置射频天线发送出去。阅读器天线接收标签发送过来的调制信号,经过天线调节器传送到阅读器信号处理模块,进行解调和解码后将有效信息送至后台主机系统进行相关处理。主机系统根据逻辑运算识别该标签的身份,针对不同的设定做出相应的处理和控制,最终发出指令信号控制阅读器完成不同的读写操作。
(4)应用系统
应用系统主要由中间件和应用软件组成。中间件由主机、服务器、通信硬件接口组成,常用于搭建计算机网络资源,能让各种应用技术实现数据通信与信息共享。应用软件处于硬件平台的上层,是一种系统软件或独立程序。应用程序对电子标签进行数据处理是通过RFID中间件来来实现的,中间件通过应用程序接口(API)连接到应用程序端口,从而实现应用程序—中间件—阅读器—电子标签的指令和数据传输,进而达到对电子标签的读写工作。
2 视频车牌识别系统
视频识别技术是一种以计算机视觉技术和视频图像处理为基础,对路面运动物体进行监测分析的技术能够检测到受监控路面的车辆并自动提取车辆牌照信息(含汉字字符、英文字母、阿拉伯数字及号牌颜色)后进行处理。一般完整的视频车牌识别系统包括前端系统、通信系统、后台系统。
(1)前端系统是由路面交通视频监控子系统、隧道交通视频监控子系统和高点交通视频监控子系统组成。主要实现的功能有:视频获取与回传,采用高清视频电荷耦合器件(Charge Coupled Device,CCD)监控摄像设备获取视频,并对视频流进行采样,分析得到车牌号码,以国际通用的编码格式,将视频数字化传回后台系统。
(2)通信系统采用有线或无线等方式传输,将前端系统的数据交付后端系统。
(3)后端系统主要用于将前端系统采集的数据进行解析,实现视频监控、回放、系统管理、查询等功能。
3 RFID与视频双机识别系统构建
3.1 RFID系统的基本工作流程
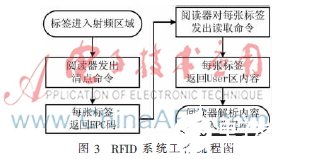
本设计采用遵循ISO18000-6C国际标准的阅读器,当携带电子标签的目标车辆出现在阅读器的工作范围内时,阅读器所发出的磁场对区域内所有的电子标签进行读写操作,当每一个电子标签接收到阅读器发出的信号,依据收到信号进行解析,返回含有目标信息的高频载波信号,经过卡内模拟射频模块发射出去,接收天线接收到电子标签发来的载波信号,经过阅读器解码器解析提取出相应信息,最终实现系统对目标车辆的自动识别和信息采集。实现过程如图3所示。
3.2 双机系统识别过程
在本设计中,由于RFID系统识别的距离较远可达到20 m~25 m,所以整个双机识别系统会先从射频系统执行。首先进行清点操作,清点操作主要是用于检测射频区域内是否有电子标签存在。为了避免因车辆速度过快而检测不到的情况,每次清点操作间隔会尽可能短,约为0.2 s。检测区域长度一般5 m~15 m左右,所以当车辆在小于180 km/h速度的情况下,至少可以检测到一次,但通常情况下清点操作可以检测到数次至数十次,这由车辆的速度决定。在检测到区域内的电子标签后,可获取到射频区域内电子标签的数量以及每个标签EPC码(Electronic Product Code),由于EPC码作为标签的唯一标识,进而通过EPC码定位到对应标签,读取标签的USER区域内的数据,将得到的内容存入临时列表中。
由于清点操作每0.2 s进行一次,所以会得到大量重复数据,需要去掉多余数据,只留下第一次进入天线射频区域的记录,此记录第一个数据段为毫秒级的时间戳,第二个数据段为USER区的内容,将维护后的数据存入原始ID数据库。
视频识别系统采用动态触发方式,摄像头可设置触发位置和车道宽度。当车辆行驶至触发位置时,进行触发拍照,一次触发最少得到3张照片,即一张车牌照片、一张违章照片、还有一张全景照片。将车牌照片进行定位、字符分割、字符识别等处理,得到车辆号牌等信息,将号牌信息存入视频识别数据库。
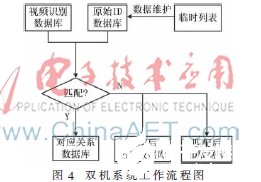
原始ID数据库作为整套双机识别系统的核心部分,将每次拍照的到的视频车牌号码与5 s内的电子标签数据进行遍历逐一匹配。匹配主要内容为视频识别号码与USER区车牌号内容。
匹配结果分为匹配成功和匹配失败两类。如果匹配成功,说明视频号码找到与之对应的电子标签号码,故不存在车辆套牌情况,属于合法车辆,将本次识别的车牌信息与电子标签信息,一并存入对应关系数据库。匹配失败包含两种情况:一种是由于硬件系统识别问题,光线或角度问题导致视频系统或射频系统识别错误;二是在视频和射频系统都正常工作的情况下,匹配不成功,说明存在号牌造假、套牌等情况,该车为违法车辆。将视频识别信息与标签信息,分别存进两个独立的数据库中。在两个数据库中,存储数据的第一段为毫秒级时间戳,这样有益于数据库的管理,降低后期人工执法的难度。同时,为了保证采集的视频识别号码遍历整个数据库的速度,故需将原始ID数据库定期进行清除,大约为1.5 min清空一次。双机系统工作流程图如图4所示。
4 实验结果
该双机识别系统中RFID部分采用中兴ZXRIS 6700阅读器,ZXRID 6602发卡器,ZXRID 2621陶瓷标签。阅读器最大通信距离25 m,最大传输速率为前向160 Kb/s、反向640 Kb/s。视频识别部分采用海康iDS-2CD9361-S型摄像机,500万像素,可实现动态触发、前端解析。
在单向双车道的实际道路中,由于电子标签的安装数据量较小,约为100张,所以可以很好地实现双机匹配识别功能,能够将得到的数据按照规定的编码规则存入数据库。对于匹配失败的数据,在数据库中进行高亮提示。本系统安装便利,组网简单,操作简单,可为大规模双机识别技术的推广提供应用参考。
-
RFID识别系统2024-12-06 3660
-
远程RFID自动识别系统的研究2023-11-06 605
-
智能车目标识别系统的设计实现资料推荐2022-09-06 1709
-
怎样去设计基于STM32单片机智能RFID刷卡汽车位锁2021-11-26 1872
-
如何利用rfid技术来构建出租车识别系统2020-03-13 943
-
怎么通过ZigBee和RFID实现电子标签识别系统?2019-09-05 2491
-
怎么设计基于Blackfin561的嵌入式车牌识别系统?2019-08-30 1401
-
RFID射频识别系统怎么实现?2019-08-26 6045
-
RFID智能交通管理系统能实现什么功能?2019-08-22 3627
-
主动式射频识别系统的设计和实现2019-05-29 1728
-
RFID门禁刷卡识别系统设计的原理图和元器件清单资料说明2019-05-06 2979
-
RFID智能识别系统设计2018-01-26 1306
-
基于RFID的舰舱身份识别系统设计_杨帆2017-01-13 839
-
图尔克 RFID标准组件式射频识别系统BLident2009-11-17 2179
全部0条评论

快来发表一下你的评论吧 !
