

基于TMS320F240专用定点可编程芯片实现电动机微机保护装置的设计
处理器/DSP
描述
作者:单亚娟,郑建勇,曹晓华
1 引言
数字信号处理(DigitalSignalProcessing)是利用专门或通用的数字信号芯片,以数字计算的方法对信号进行处理,包括对信号的采集、变换、滤波、估值、增强、压缩、识别等处理,以得到人们需要的信号形式。 DSP处理器的一个重要特征是采用改进的哈佛结构,具有独立的数据和地址总线,从而使得处理器指令和数据并行,大大提高了处理效率。
在微机保护产品中采用DSP处理器取代传统的8位或16位单片机,可以在硬件资源、开发平台等方面取得很多优越性,并通过与CPLD、FLASH等的配合,完成一些复杂的算法,所以基于DSP平台电动机微机保护装置除完成电动机综合保护功能外,还能够完成电动机的转子笼条断条故障诊断等一些比较复杂的功能,从而大大提高保护装置的性能。
2 电动机保护原理
电动机常见的故障类型有对称故障和不对称故障两大类。对称故障对电动机的损害主要是由于电流增大引起的热效应,不对称故障多半不出现明显的电流幅值变化,它对电动机的损害主要是不对称引起的负序效应。根据对称分量法分析,当电动机发生不对称故障时,电动机的电流可以分解为正序、负序和零序分量,且负序、零序电流会以较大幅值出现。根据上述分析,可以将高压电动机的保护分解成过流保护、负序电流保护、零序电流保护三个部分。
(1)过流保护,分为电流速断、定时限过流、热过载反时限过流保护三段式。
1)电流速断保护:速断保护动作电流Ids整定值按下列两条计算原则中所得的最大值选定。
a.要求电流速断保护的动作电流Ids必须不大于电动机满载启动时的起动电流Iq。
Ids=KcIeq=KkKqIe(1)
式中:Ie——电动机的额定电流归算到机端电流互感器二次侧的值;
Kq——电动机起动系数,一般取4~7;
Kk——可靠系数,取1.2~1.3。
b.在电动机附近速断保护范围之外短路时,要求Ids大于次暂态短路电流。
式中:同步电动机
=5.5Ie;同步补偿机
=6Ie;对异步电动机附近外部相间短路式,
只需按式(1)计算即可。
2)定时限过流保护:延时定值需躲过电机自启动时间。当电机启动时,在T<Tstart时,启动电流小于保护定值,保护不动作;当T≥Tstart时,时间元件动作,保护的电流定值自动减小一半,若此时启动电流仍超过保护新定值(为原定值一半),保护动作跳闸。
3)热负载反时限过流保护:热过载反时限过流保护的动作方程如下:
式中:Ieq——电动机运行中三相电流中的最大值;
Is——可整定的保护动作电流;
τ——可整定的发热时间常数(一般由制造厂提供)。
(2)负序保护
发生严重的不对称故障时,负序电流I2很大,这时要求根据I2设置单独的快速保护。
一段:高定值I′2d,短延时t1:t1为固定值。
式中,为系统最小运行方式下,电动机机端两相短路时,最小的短路电流负序分量。
二段:低定值,长延时t2:t2由用户整定,一般可整定为3 s。
=(0.3~0.4)Ie(5)
按式(4)计算后,还必须检验的值大于。
(3)零序保护
当3I0大于保护的动作电流I′0d时,经短延时t保护出口动作,发出接地信号或跳闸。
对3 kV、6 kV、10 kV电网中的大多数变压器中性点不接地或经消弧线圈接地的系统,保护通常只需发接地信号,不跳闸。保护的短延时可整定为0.1~0.5 s。对3 kV、6 kV、10 kV电网中的少数变压器中性点经高阻接地的电网,保护动作于跳闸,其动作电流I′0d应躲过启动过程中由于三相电流不完全对称而出现的三倍不平衡零序电流,延时整定为0.5 s。
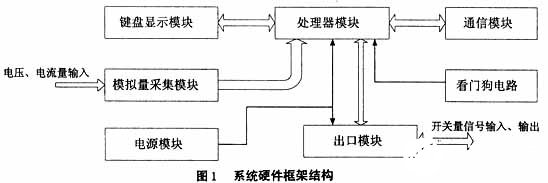
3 TMS320F240电动机微机保护装置的硬件系统结构
电动机微机保护装置的硬件系统结构采用模块化结构,主要由处理器模块、键盘显示模块、模拟量采集模块、出口模块、电源模块和通信模块六个部分组成。其框架结构如图1所示。
4 处理器模块的设计
处理器模块是整个装置的核心,负责模拟信号的调理滤波、采样、模拟/数字转换、频率和相位的测量、开关量信号的输入/输出、通信、系统计时、数据计算、逻辑判断等功能。处理器模块采用DSP处理器进行设计,可以充分利用其数据运算处理的能力,其软硬件开发平台不仅可以进行复杂的算法设计如交流采样的FFT算法、自校正功能等,而且可以对电动机早期故障(如转子笼条断条)及一些非正常运行状态作出诊断,从而大大提高电动机保护装置的性能。
本装置的处理器模块由TMS320F240微处理系统构成。TMS320F240是TI公司于1997年在TMS320C2xx的基础上推出的一种专用定点可编程芯片,它在单一芯片上集成一个DSP内核和各种外设器件,可以解决各种工程应用方案。为了简化系统设计,可以把系统的一些外围控制电路由 CPLD(Complex Programmable Logic Device)来实现。在设计中选用XILINX公司生产的CPLD,其中XC9500系列产品采用了系统内5 V可编程FASTFLASH技术,并且含有内部JTAG双向扫描测试逻辑。本系统采用电路原理图方式对CPLD进行逻辑编辑。
F240芯片可以工作在微处理器或微控制器两种状态,通过MP/MC引脚上的电平决定,其主要区别在于选用片内或片外的存储空间作为程序存放地址。考虑到系统调试阶段需要外部的存储空间,所以在系统设计时添加了高速静态RAM作为外部程序空间。另外,由于F240使用的是16位数据和地址总线,所以选用两片8位的SDRAM构成外部程序空间。
F240的存储结构特点是程序、数据和I/O地址空间分离,每部分空间为64 K字。由于F240的数据地址和I/O地址是分开的,由DS\信号作为外部数据存储器的片选信号,而IS\信号表示对外部I/O地址进行访问,所以只需要对外部设备进行地址译码,由CPLD完成。
另外,TMS320F240通过边沿扫描的方法实现仿真器对目标系统的仿真,由仿真器接出的仿真头和芯片的JTAG口相连可以进行仿真和调试。
5 其它各单元电路
装置其它各组成单元电路主要有:模拟量测量电路、开关量输入/输出电路、键盘显示电路、通信电路等。
F240片内集成了采样保持电路和模拟多路转换器的双十位AD转换,鉴于对于电动机测量和保护精度而言,若电流采样值范围在0~10 mA,采用10位AD可以达到精确到小数点后一位,大致可以满足多数的电动机保护的要求,为了尽量充分的利用芯片资源,采用了片内AD转换进行设计。但是考虑到保护尤其是监控精度要求的严格性,现已在本装置中外扩了14位A/D转换芯片AD7863,这样可以更好的符合精度要求。对外部信号进行调理的电路由精密电位器构成,滤波器则采用二阶低通滤波器。此外,模拟量测量电路中还包括过零检测单元,实现模拟量频率和相位的测量。
开关量输入/输出电路主要完成状态信号的输入和动作信号的输出。继电保护装置CPU的扩展口一般较少,不能满足输入输出的需要,因此在读入开入量及输出量时,往往需要进行口的扩展。本装置中此部分功能集成在CPLD中,并挂在其内部的地址/数据总线上。
装置采用薄膜键盘,一共有9个按键,只需要通过上、下、左、右、取消、确认六个按键结合菜单便可直观地在线、离线整定定值、修改实际时间、就地操作开关等。采用中断方式相应键盘,以减少其对CPU的占用。F240的中断信号是低电平有效,所以键盘的中断信号通过一个与门产生。
通信电路主要由CAN通信模块电路构成,采用Philips的SJA1000作为CAN控制器,驱动器采用CAN控制器接口芯片PCA82C250。 PCA82C50是CAN协议控制器和物理总线的接口,对总线提供不同的发送能力和对CAN控制器提供不同的接收能力,完全和ISO11898标准兼容,并具有对电池和地的短路保护功能。
此外,为了装置的能够可靠的工作,一般需要加上WATCHDOG电路,本系统采用X5043看门保护功能。
6 软件设计
在微机保护装置的软件设计中,主要考虑的是交流采样算法、保护算法,通过采样得到的数据按照一定的保护算法来进行判断保护是否动作。传统的一点、两点、三点以及均方根采样算法都是基于电压、电流为纯正弦变化的情况考虑,而在实际电动机发生故障时,往往是在基波基础上叠加有衰减的非周期分量和各种高频分量,因此要求微机保护装置对输入的电流、电压信号进行预处理,尽可能地滤掉非周期和高频分量。考虑到富士算法的很强的滤除高次谐波的功能,但是全波富士算法需要一个周波的N个采样数据,响应速度较慢,为了提高保护的速动性,在比较现有的各种改进半波富氏算法的基础上,决定采用半波傅氏算法与Mann-Morrison算法相结合的快速算法,用半波富氏算法计算基波实部,而用Mann-Morrison算法计算基波幅值,既可以保留半波富士算法响应速度的优点,又可以克服其滤波功能较弱的不足。
电动机保护装置的软件采用了模块化的设计思想,由主程序模块、中断服务子程序模块和各个功能子程序模块三大部分组成。实际编程采用C语言和汇编混合编写,提高了数据处理的能力,也保证了程序的可靠性。
7 结束语
在模块化设计的基础上,开发的TMS210F240处理器为硬件核心的微机继电保护装置,是一个通用的硬件平台,能够满足电动机保护可靠性、选择性、速动性以及灵敏性的要求。在此平台上不仅可以实现对高压电动机的保护,通过对软件的适当修改还可以实现变压器保护、电容器保护等其它功能。
责任编辑:gt
-
微机保护装置的功能2021-09-13 2359
-
基于TMS320F240 DSP的开关磁阻电机控制系统2021-04-27 1282
-
电动机的过载保护的保护装置是什么2021-03-16 2754
-
基于TMS320F2812 的针对于中低压线路的微机保护装置2021-02-04 1911
-
基于DSP芯片TMS320F240实现异步电动机调速系统的应用方案2020-11-27 2667
-
TMS320F240单片机2017-01-12 755
-
基于TMS320F240的双闭环调速系统2011-09-27 1041
-
基于F2812DSP的电动机保护测控装置设计2009-12-19 630
-
AD7711与TMS320F240接口设计2009-10-13 3257
-
基于TMS320F240的串行通讯设计2009-08-11 715
-
基于故障分量原理的电动机差动保护装置2009-07-11 1131
-
TMS320F240与PC机串行通讯的设计2009-05-17 1572
-
TMS320F240在高频PWM调速器中的应用2009-02-09 1373
全部0条评论

快来发表一下你的评论吧 !
