
资料下载


如何使用NIEVS和PXI实现机器视觉辅助驾驶系统的开发
123
分享资料个
“借助NI EVS和PXI平台,我们通过硬件设计和软件编程完成了此系统的开发。通过对车道偏离预警(LDW)功能的设计与测试,证明该系统可以在机器视觉的辅助驾驶开发中运用。”
The Challenge: 基于机器视觉的辅助驾驶技术日渐成熟,在中高级轿车中已经实现产品化,切实提高了汽车的主动安全性能。开发机器视觉辅助驾驶系统时,需要考虑不同外界因素的影响,导致整个系统的算法复杂、代码繁多;在开发初期,考虑到安全因素的影响,系统不可能直接进行实车试验,进一步加深了系统开发的难度。这些都是开发机器视觉辅助驾驶系统时面临的难题。如何更加关注算法开发,减少代码开发投入,并能在有效、可信、可重复的环境下测试,以便及时发现问题并进行整改,是机器视觉辅助驾驶系统开发面临的难点。
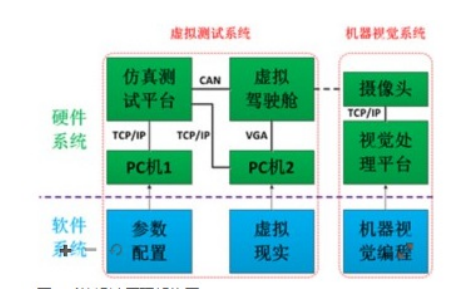
The Solution: 该方案主要解决机器视觉辅助驾驶系统的快速开发及测试问题。NI的EVS嵌入式视觉系统适合快速检测及大型图像处理,能连接多架相机,并实现同步检测。借助LabVIEW编程语言及VDM编程模块可快速实现要求的识别功能,使机器视觉产品的开发更加高效。基于NI PXI的仿真测试平台,结合虚拟现实软件CarMaker,通过VeriStand集成整个测试系统,从而搭建出真实有效的虚拟测试场景,实现机器视觉功能的全面、有效和可重复的测试。开发新功能时,借助NI EVS平台可以快速完成方案建模及编程过程;借助于基于NI PXI的虚拟驾驶测试平台,既能够尽早发现产品问题并进行整改,又可以保证测试过程的安全性。机器视觉系统与测试平台的结合,能进一步提升基于机器视觉辅助驾驶系统的开发效率。
1 引言
基于机器视觉的辅助驾驶系统旨在提高驾驶员的环境感知能力,通过辅助系统监测外界环境,并在非安全情况及时向驾驶员发出预警,从而使人—车—路系统更加稳定、安全、可靠,提高汽车的安全性能。
开发基于机器视觉的辅助驾驶系统时,需要面对以下难点:
(1)系统算法复杂,代码繁多。机器视觉主要是借助摄像头采集外界信息并将其转换为数字图像信号进行处理,面对不同的外界环境和检测目的,致使系统需要处理的针对点不一样,因此,使得整个系统在算法方面异常复杂,开发过程缓慢。
(2)测试环境要求苛刻。在系统开发后期,测试其性能并进行整改是整个研发过程中的关键步骤之一。相比较于其他汽车电子产品,基于机器视觉的辅助驾驶技术产品在测试时需要考虑两点因素:第一,实车试验时,驾驶员的安全是否能够得到保障;第二,测试过程需要有效、可信、可从复,便于及时发现问题并进行整改。在开发基于机器视觉辅助驾驶系统过程中,如果能把上述难题顺利解决,将为以后基于机器视觉的辅助驾驶技术产品研发做好铺垫,提高辅助驾驶技术产品的开发效率,促进辅助驾驶技术产品早日投入量产,最终提高汽车的安全性能。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章




