

KUKA-C4如何通过网络备份到PC上
描述
保存在网络上:
该操作步骤会在网络路径上生成一个压缩文件。在默认情况下,这个文件名称与机器人名称相同。但在投入运行 > 机器人数据下也可以为此文件确定一个自己的名称。
必须在投入运行 > 机器人数据下对用于存档的网络路径进行配置。若需要用户名和密码才可以在该路径上存档,则可以在此同样将它们输入。
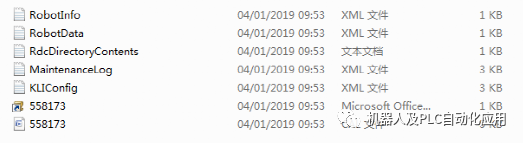
此存档会显示在导航器的 ARCHIVE: 目录中。除网络路径外还会自动将其保存在 D: 上。这里会生成一个 INTERN.ZIP 文件。
特殊情况 KrcDiag:
这个菜单项会在网络路径上生成文件夹 KRCDiag。该文件夹中包含一个 ZIP压缩文件。此外还会将此 ZIP 压缩文件自动存档到 C:KUKAKRCDiag 上。
机器人数据:在主菜单中选择投入运行 > 机器人数据。
进入机器人数据画面的条件:
• 运行方式 T1 或 T2
• 未选定程序。

| 1 | 机器人序列号 |
| 2 | 运行时间。在驱动装置接通后,运行小时计数器开始运转。也可通过 $ROBRUNTIME 变量显示运行时间。 |
| 3 | 机器人本体数据名称 |
| 4 | 机器人控制系统的名称。该名称可以更改。 |
| 5 |
现在可以对该机器人控制系统的数据进行存档。此处确定目标目录。可是网络目录或本地目录。 如果此处确定了一个目录,则导入/导出长文本时也可使用此目录。 |
| 6 |
若在该路径上存档时需要用户名和密码,则可以在此将它们输入。 然后存档时就不再需要输入。 |
| 7 | |
| 8 | 只有在复选框将控制系统名称应用到存档名称中未打勾时,才显示该栏目。这里可以规定存档文件的名称。 |
| 9 |
• 复选框打勾:控制系统名称将被用作存档文件的名称。如果没有规定控制系统名称,则会使用 archive 作为名称。 • 复选框未打勾:可为存档文件规定自己的名称。 |
| PID 传输至 RDC |
只与精确定位的机器人有关:可以手动将带精确定位机器人数据的 XML 文件传输到 RDC 上。 用该按钮可以显示目录结构。通过该结构可选择带当前序列号的文件所处的目录。可以选中文件并将其传输到 RDC 上。 |
| MAM 传输至 RDC |
只与零点标定标记固定设定的机器人有关:可以手动将带机器人特有零点标定偏移数据的 MAM 文件传输到 RDC 上。 用该按钮可以显示目录结构。通过该结构可选择带当前序列号的文件所处的目录。可以选中文件并将其传输到 RDC 上。 |
| CAL 传输至 RDC |
可以手动将带 EMD 零点标定中数据的 CAL 文件传输到 RDC上。 用该按钮可以显示目录结构。通过该结构可选择带当前序列号的文件所处的目录。可以选中文件并将其传输到 RDC 上。 |
| 存储 RDC 数据 |
用该按钮可以将 RDC 上的数据在目录 C:KRCRoboterRDC 中进行临时备份。 提示:在重启机器人控制系统或存档数据时将删除该目录。如果要持续保留 RDC 数据,则必须在另一个位置上进行备份。 |
的MAM文件.
的CAL文件.
实例:
机器人上的设置:设置要存在网上的PC电脑的IP地址,使用的用户名和密码.
注意书写网络存档路径的书写格式
网络上的PC上设置的IP要与机器人上设置的一致
建立共享文件夹”ROBTOR”
打开文件夹的属性:
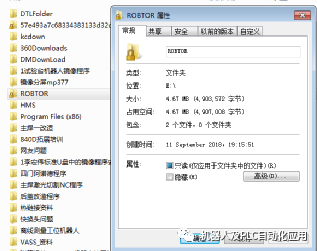
然后选择共享:
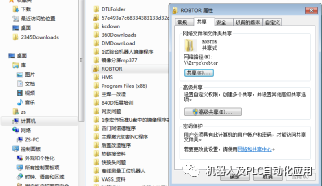
进入”共享”,设置用户名的权限,选择”读/写”,然后选择共享,回到上一画面,点击’应用’.
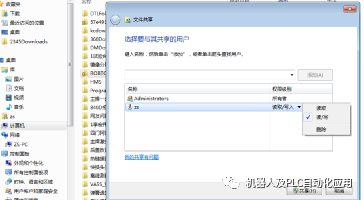
PC 电脑设置完毕。
责任编辑:xj
原文标题:KUKA-C4的通过网络备份到PC上
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
更改KUKA C 4 Windows系统的密码2023-12-12 2901
-
网络冗余是什么?网络冗余备份如何实现?2023-12-01 4268
-
是否可以读取STEVAL-SPIN3020板中存储的参数并将其备份到我的PC上?2023-01-17 419
-
KUKA-C4点焊机器人的控制(大众版)2022-07-12 6347
-
KUKA机器人伺服驱动模块维修2021-09-17 1851
-
如何把KUKA-C4的通过网络备份到PC上?2021-02-09 2315
-
NAS网络存储中如何备份数据?2021-01-06 1787
-
KUKA C4 安装工业以太网软件详细操作步骤2020-10-27 8604
-
KUKA-C4机器人SWRITE函数的用法说明2020-06-30 3223
-
教你如何在NAS网络存储中使用Duple Backup进行备份2020-05-06 1847
-
这么设置USB Copy数据就能轻松备份到NAS网络存储中啦~2020-01-13 2123
-
NAS网络存储数据备份使用教程2019-12-03 3412
-
不在网络上的远程PC上运行SDK2018-12-19 2098
-
远程备份监控系统的设计与实现2009-09-18 567
全部0条评论

快来发表一下你的评论吧 !
