

KUKA电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
描述
SGL_MoveToPos(SGEQ_StartPoint,SGEQ_StartPoint,#CLS_OPEN,MovementType)
MoveType =MovementType=#SG_PTP 点到点
ContType=#CLS_OPEN
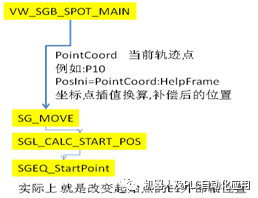
TargetPos =SGEQ_StartPoint
HelpPos= SGEQ_StartPoint
GLOBALDEF SGL_MoveToPos(TargetPos:IN,HelpPos:IN,ContType:IN,MoveType:IN)
该程序用于在焊接前移动到焊接轨迹点使用
DECLE6POS TargetPos, HelpPos
DECL SG_Cont_T ContType
DECL SG_MoveType_T MoveType
CONTINUE
IF((ContType==#SOPEN) OR (ContType==#SCLOSE) OR (ContType==#CLS_OPEN))THEN ContType==#CLS_OPEN
; 关于PTP的第二近似定位=> LIN和LIN至PTP ..
SWITCH MoveType MoveType=#SG_PTP 点到点
CASE #SG_PTP 点到点
PTP TargetPos C_DIS 使用轨迹逼近
CASE #SG_LIN 直线
LIN TargetPos C_DISC_DIS
CASE #SG_CIRC 圆弧
CIRC HelpPos, TargetPos C_DISC_DIS
ENDSWITCH
ELSE 如果没有上述激活功能ContType=….直接移动没有过渡
SWITCH MoveType
CASE #SG_PTP
PTP TargetPos
CASE #SG_LIN
LIN TargetPos
CASE #SG_CIRC
CIRC HelpPos, TargetPos
ENDSWITCH
ENDIF
CONTINUE
责任编辑:xj
原文标题:KUKA 电伺服焊钳,SGL_MoveToPos焊接前移动到焊点位置
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
-
KUKA机器人固定焊钳的铣削控制2023-04-13 1894
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 2732
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 2074
-
将步进电机移动到精确位置开源分享2022-11-04 820
-
电伺服焊钳的摆臂铣刀的SG_Background控制2022-07-26 1763
-
KUKA机器人焊钳铣削清零方式2021-06-18 4473
-
简单介绍KUKA外部轴应用2020-10-27 3425
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 8034
-
简述KUKA外部轴的几种应用2020-08-10 3173
-
KUKA电伺服机器人焊点位置补偿2020-06-12 7943
-
电伺服焊钳铣削分析:用户铣削2020-06-11 3744
-
KUKA根据伺服焊提示报警信息,寻找故障源.2020-05-10 5065
-
关于KUKA 焊接机器人2019-05-30 4618
-
机器人焊接技术在车身焊接工艺的应用2018-11-01 2681
全部0条评论

快来发表一下你的评论吧 !
