

设计步进电机设计中遇到的那些问题
电子说
描述
在本文,我们将为大家带来解答有关设计步进电机设计中遇到的四个常见问题。步进电机是各类系统不可或缺的构成部分,因此其需要集精确定位、出色的速度控制和可重复运动等特点于一体。步进电机被广泛用于消费类和商用机器中,比如3D打印机、纺织机器、医疗器材、机器人、舞台灯光和ATM等系统。
步进电机具有两个由H桥控制的电流绕组,并以步进角定义的离散步长运动。如果您使用此类电机进行设计,则会遇到一些常见挑战。其中一些与驱动相关,而另一些与系统相关。本文将回答一些最常见的问题,其中一些问题如图1所示。
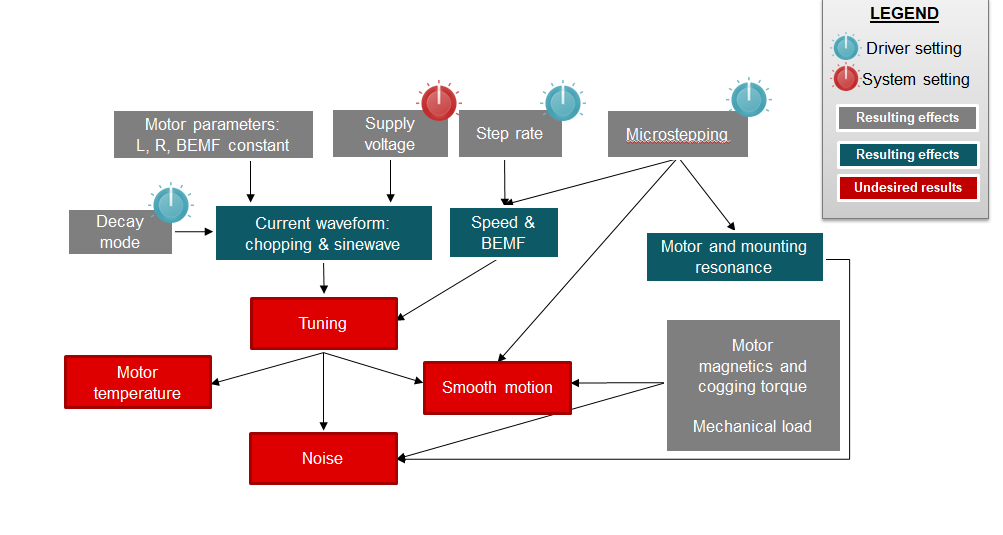
图 1:步进电机设计时的常见挑战
Q1:
什么是调谐?
由什么原因引起,为什么它很重要?
步进电机系统必须连续驱动和衰减电流,以便调节电流并在每一步保持电机的位置。这会产生电流纹波。设计人员结合使用快速、慢速和混合衰减模式来控制流经电机绕组的电流。选择最佳衰减模式的过程称为“调谐”。 调谐很重要,因为调谐不当会引起振动和不必要的可听噪音,如图1所示。
良好的调谐可直接实现平稳的运动、减少可听噪音并提高定位精度。TI的专利智能调谐技术是一种衰减方案,可适应不断变化的工作条件和电机参数,从而使步进电机的运动更加平稳。智能调谐会逐周期地自动优化衰减模式以维持电流调节,从而使电机保持平稳、安静运行,且比使用固定衰减模式时的温度低11°C。智能调谐还可防止电流调节损失,从而最大程度地降低电机噪声和振动。图2a、2b和2c所示为未调谐波形的实例,而图2d所示为使用智能调谐的完美调谐波形。
图 2:驱动和衰减状态不同
Q2:
是什么导致高可听噪音?
可以减少系统中的可听噪音吗?
步进电机的可听噪音量取决于电机的类型和运行条件。步进电机发出的噪声源可为磁性、机械或电气噪音。纹波量直接影响系统中的电气噪声量。确保最小纹波控制(降低噪声)的一种方法是使用诸如DRV8426和DRV8424步进电机驱动中可用的智能调谐纹波控制,其中关断时间(TOFF)基于操作进行调整以实现目标纹波,如图3所示。
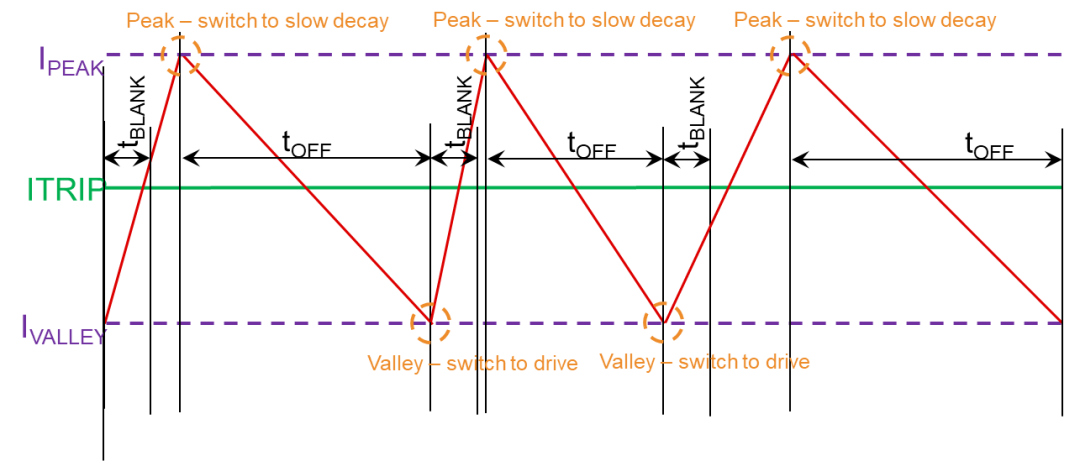
图 3:智能调谐纹波控制
图4所示为使用智能调谐纹波控制的可听噪音性能和使用混合衰减的竞争设备的可听噪音性能的比较。图中清楚表明DRV8424的性能提高了10%。
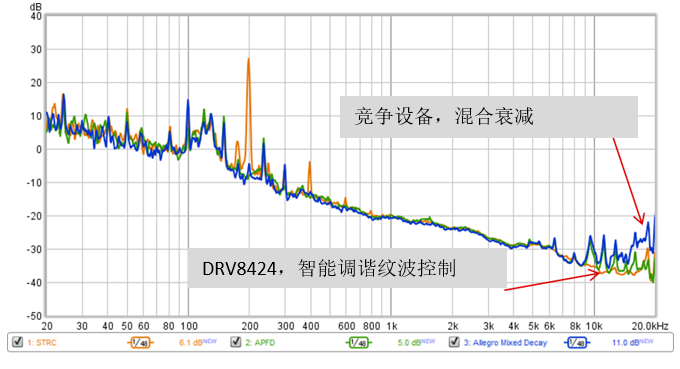
图 4:使用智能调谐纹波控制的可听噪音性能
与竞争对手的设备的可听噪音性能对比
Q3:
是什么导致电机振动?有没有办法减少此类振动并增加运动的平滑度?
产生电流纹波需要通过连续驱动和衰减绕组电流来保持电流稳定并在每一步保持电动位置。在传统系统中,使用高比例的慢衰减并提高电机速度会引入较大的反电动势电压,从而导致电流调节损失、电机振动和过热。由于步进驱动使用开环控制,因此没有位置参考。此外,较差的通道间电流匹配、较差的电流感应精度和较低的微步频可能会导致断续运动。
DRV8426、DRV8428和DRV8424步进电机驱动中的智能调谐技术可检测到电流变化,并自动插入更高比例的快衰减以保持电机稳定。此外,这些设备还提供1/256微步频和集成电流感应,具有±5%的精确电流感应精度,可将电机的运动平滑到其预期位置。
Q4:
是否有方法降低物料清单(BOM)成本和系统尺寸?
步进电机驱动通常需要两个电流分流感应电阻来监视和调节电流。这些分流电阻器价格昂贵、增加了BOM成本并需要额外布线。我们的DRV8426、DRV8424、DRV8434步进电机驱动集成了电流感应功能,无需使用外接、笨重、昂贵的分流电阻器,同时实现±5%的电流精度。图5将按比例绘制的DRV8424/DRV8426评估模块(EVM)与竞争产品对比,其中DRV8424/DRV8426 EVM比竞争产品1小75%,后者需要外接电流感应电阻,而DRV8424/DRV8426 EVM比竞争产品2小50%,后者集成电流感应电阻。
图5:EVM尺寸比较
责任编辑:xj
原文标题:设计步进电机遇到挑战?帮你解决这四个常见问题!
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
-
步进电机设计思路2011-12-21 7300
-
PCB敷铜方面需要注意那些问题呢?2014-10-28 5267
-
请问在设计LED电源时需要考虑那些问题?2014-11-07 5595
-
步进电机设计参考方案2018-10-16 2303
-
请问pcb高频电路布线是需要注意那些问题?2019-03-29 1592
-
请问伺服电机代替步进电机时应该注意那些细节?2021-09-24 1508
-
本本内存升级 要注意那些问题?2010-01-26 999
-
一种利用51单片机控制的步进电机设计2021-11-30 1387
-
51单片机进行串口通信时会遇到那些问题2019-04-12 1122
-
进行步进电机设计的程序和一些数据资料免费下载2019-05-23 1354
-
设计步进电机设计中遇到的四个常见问题2021-01-02 4462
-
基于MCU 的步进电机设计方案实现2022-08-16 3529
-
步进电机驱动器开发中遇到的问题和解决方法2023-04-08 3957
-
步进电机与伺服电机对比分析2023-07-13 2841
-
步进电机常见问题及维护2024-03-17 3409
全部0条评论

快来发表一下你的评论吧 !
