

基于Wild Thumper的ROS机器人设计
电子说
描述
我之前已经建造了一些机器人,但从未能够使用它们进行真正的导航,例如成功地从客厅驾驶到厨房。原因是一些红外和声纳传感器不足以进行“真实”导航。您可以避免遇到障碍,但不能超过其他。直到几年前我通过rviz GUI发现ROS(机器人操作系统)后,我的软件才更适合于此。由于具备ROS的现成机器人有些昂贵,因此我决定围绕Wild Thumper 4wd底盘建造一个新机器人。几周内,硬件和电子设备几乎完成。从那时起,我花了一些时间进行调整。目标是能够通过SLAM(同时进行定位和地图绘制)在室内导航,并使用GPS在室外进行导航。背面的自由空间应该在将来某个地方承载机械臂。
细节 :
机械:Wild Thumper 4WD底盘 电机升级编码器 总重量:3.3公斤
电源:电池:2x 7.2V NiMh,融合30A(慢速) 通过稳压器D24V50F5(5A)提供5V,与3A融合(快速) 两个电池分别使用LM5050-2有源或电路并联连接。另一个LM5050-2可以并联连接,用于扩展坞电源。
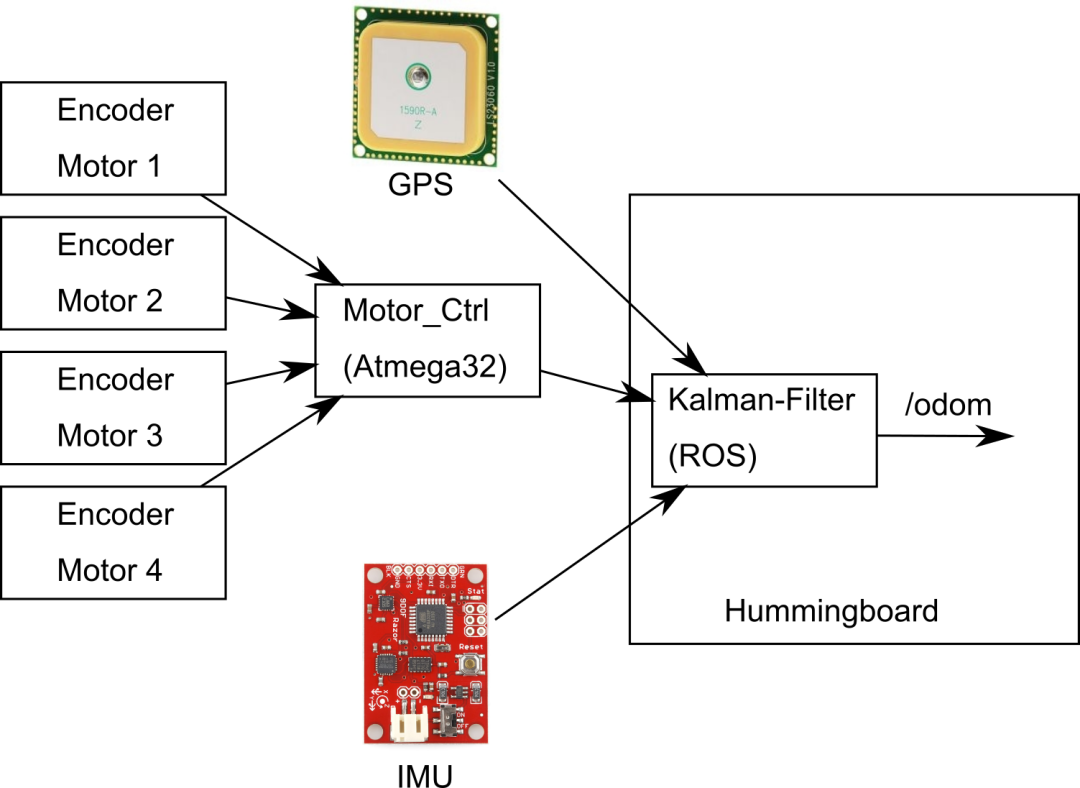
电脑:固态运行悍马板(i.MX6 ARM Cortex-A9双核1GHz,2GB RAM) AVR Atmega32用于电机控制 用于I / O的AVR Atmega328(Arduino Nano)
外围设备:悍马板:GPS(uart),IMU(USB),3D摄像头(USB),通过I2C的2xAVR,PCA9517“电平转换I2C总线中继器”,以将3.3V与5V I2C桥接。
电机控制:
电机由4个VNH2SP30驱动,在20kHz PWM上各一个 车轮编码器的速度控制(PID)和里程表在Atmega328上计算。
Atmega328上的输入/输出:
3个声纳传感器,2个红外距离传感器,电池电压
里程表计算:
使用Tinkerforge IMU Brick 2.0和Kalman滤波校正的车轮里程表
传感器:
Xtion Pro实时深度相机
2个IR 2D120X(左1个,右1个)
3个声纳SRF05(2个前置,1个后置)
声纳传感器的目的是在不到0.5m的距离内校正深度摄像机的死区
软件:
Debian拉伸
机器人操作系统(ROS)动力学
对象如下:
借助超宽带(UWB)模块,机器人可以跟随目标,在下面的视频中,它是遥控车:
GPS测试视频:
以下视频显示了机器人通过四个GPS航路点自动驾驶广场的过程。前置摄像头显示在左下方,rviz地图视频显示在左上方。
责任编辑:xj
原文标题:基于Wild Thumper的ROS机器人,室外导航,走起~
文章出处:【微信公众号:电路设计技能】欢迎添加关注!文章转载请注明出处。
-
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识2025-04-27 2962
-
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践2025-03-03 6224
-
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!2023-11-30 7232
-
通过RA MCU和微型ROS简化机器人设计流程2023-10-24 1742
-
工程师说 | 通过RA MCU和微型ROS简化机器人设计流程2023-05-18 1962
-
如何搭建实体机器人ros底盘2022-01-20 2443
-
如何对ROS机器人的定位导航进行仿真2021-12-23 1814
-
ROS机器人定位导航仿真2021-12-17 1390
-
【抢鲜体验】- Tran***ot ROS教育机器人2021-11-25 24539
-
刚柔软机器人设计与仿真分析实例解析2021-09-02 4585
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 1610
-
机器人设计教程之基于“创意之星”的机器人设计资料说明2018-12-25 1811
-
智能搬运机器人设计2017-01-22 1219
-
[分享]LabVIEW 与机器人设计2009-05-30 9310
全部0条评论

快来发表一下你的评论吧 !
